7 Metodologia de Superfície de Resposta
7.1 Introdução
A metodologia de superfície de resposta (response surface methodology - RSM) foi apresentada por Box e Wilson (1951) como uma proposta para modelagem e otimização via experimentos planejados, sendo inicialmente aplicada em experimentos químicos. Atualmente a RSM é aplicada em diversas áreas onde deseja-se modelar e otimizar uma determinada resposta \(y\) em função de \(k\) variáveis de controle \(x_1, x_2, \dots, x_k\). Dentro do contexto do DOE a RSM é um dos métodos mais usados para otimização em engenharia. As variáveis ditas de controle são independentes e podem ser referenciadas na literatura como variáveis preditoras, de controle ou de processo.
Pretende-se neste capítulo expor a busca de região de curvatura e teste via fatorial \(2^k\) com pontos centrais. Pretende-se também elucidar a metodologia de superfície de resposta, inclindo principais planejamentos, modelagem, análise de condições de otimalidade e otimização restrita.
Neste capítulo são utilizados os pacotes FrF2, rsm, ggplot2 e ggpubr, além das funções básicas do R. Recomenda-se a instalação destes utilizando o comando install.packages("<nome_pacote>"). A instalação é realizada uma única vez, porém o pacote deve ser carregado via library(<nome_pacote>) sempre que deseja-se usar suas funções.
7.2 Intuição
Considerando uma resposta \(y\) dependente dos níveis de \(k\) variáveis independentes e quantitativas, passíveis de controle e mensuração, dada a observação de \(N\) combinações dos níveis das \(k\) variáveis de controle, pode-se estimar um modelo de resposta de \(y\) em função de \(x_1, ..., x_k\), conforme segue
\[ y=f(\mathbf{x})+\varepsilon=f\left(x_1, x_2, \ldots, x_k\right)+\varepsilon\text{,} \]
com o erro experimental normalmente distribuído, \(\varepsilon \sim N(0,\sigma^2_\varepsilon)\).
O erro experimental, dada a existência de variáveis de ruído, faz com que o modelo de superfície de resposta seja uma aproximação para a resposta na região experimental \(k\) dimensional. A motivação para a aproximação de uma função desconhecida em uma determinada região é baseada na expansão da série de Taylor em torno do ponto \(\mathbf{x_0} =x_{10}, x_{20}, ..., x_{k0}\), \(u = 1, ..., N\). Por exemplo, considerando que uma aproximação de segunda ordem seja razoável para a região de interesse, um modelo de aproximação seria conforme Equação 7.1.
\[ \begin{equation} \begin{aligned} f \cong & f\left(x_{10}, x_{20}, \ldots, x_{k0}\right) + \sum_{i=1}^k \left.\frac{\partial f}{\partial x_i}\right|_{\mathbf{x}=\mathbf{x}_0} \left(x_i - x_{i0}\right) \\ & + \frac{1}{2} \sum_{i=1}^k \left.\frac{\partial^2 f}{\partial x_i^2}\right|_{\mathbf{x}=\mathbf{x}_0} \left(x_i - x_{i0}\right)^2 \\ & + \sum_{i < j} \left.\frac{\partial^2 f}{\partial x_i \partial x_j}\right|_{\mathbf{x}=\mathbf{x}_0} \left(x_i - x_{i0}\right)\left(x_j - x_{j0}\right) \end{aligned} \end{equation} \tag{7.1}\]
Onde:
\(\beta_0 = f\left(x_{10}, x_{20}, \ldots, x_{k0}\right)\);
\(\beta_i = \left.\frac{\partial f}{\partial x_i}\right|_{\mathbf{x}=\mathbf{x}_0}\) (termos lineares);
\(\beta_{ii} = \frac{1}{2} \left.\frac{\partial^2 f}{\partial x_i^2}\right|_{\mathbf{x}=\mathbf{x}_0}\) (termos quadráticos puros);
\(\beta_{ij} = \left.\frac{\partial^2 f}{\partial x_i \partial x_j}\right|_{\mathbf{x}=\mathbf{x}_0}\) (termos de interação).
O modelo final, após reparametrização, fica conforme Equação 7.2. Os termos quadráticos, \(\beta_{ii} x_i^2\), são a novidade em relação ao modelo obtido via fatorial \(2^k\). Este modelo é dito de segunda ordem completo, contendouma constante, \(k\) termos lineares, \(k\) termos quadráticos ou de segunda ordem puros e \(k(k-1)/2\) termos de interação de sgeunda ordem ou termos de segunda ordem mistos.
\[ y = \beta_0 + \sum_{i=1}^k \beta_i x_i + \sum_{i=1}^k \beta_{ii} x_i^2 + \sum_{i < j} \beta_{ij} x_i x_j + \varepsilon \tag{7.2}\]
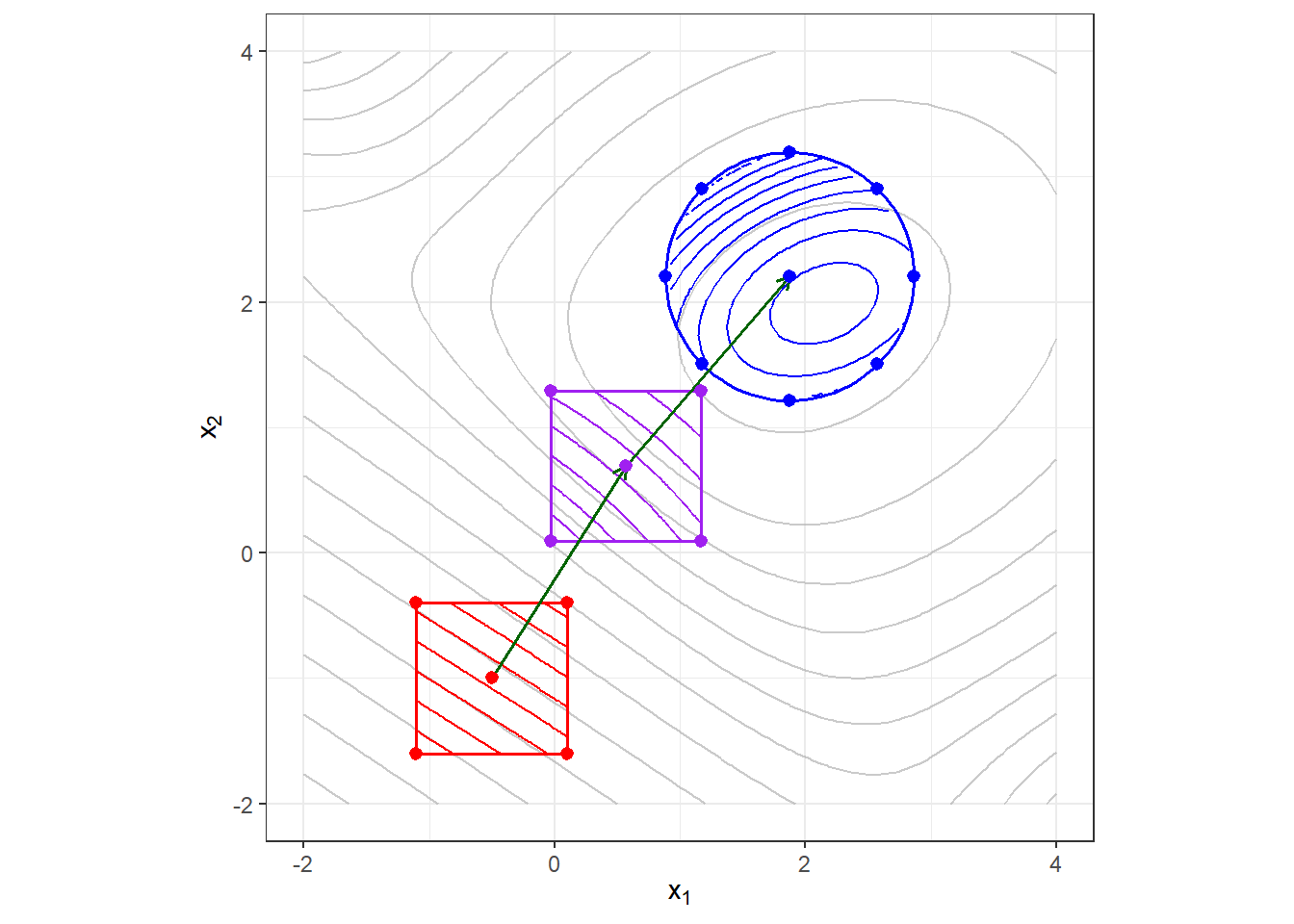
O procedimento para encontrar a superfície de resposta pode seguir estratégia sequencial, envolvendo experimentos iniciais de varredura, busca da região de curvatura, estimativa de um modelo de superfície de resposta, até a obtenção das condições ótimas operacionais. Por exemplo, supondo um caso bidimensional com domínio experimental amplo, conforme observado na Figura 7.1, observa-se em cinza uma suposta função desconhecida de interesse. Para fins de modelagem e otimização, supõe-se inicialmente que o analista selecione a região delimitada pelo quadrado vermelho para um primeiro planejamento fatorial \(2^k\) com pontos centrais. A definição de uma região inicial pequena é razoável, visto que uma aproximação quadrática não seria suficiente para uma região ampla e complexa. Obtém-se para esta região um modelo linear. Define-se a direção de máximo crescimento da resposta a partir do gradiente da função linear estimada. Realiza-se outro planejamento fatorial \(2^k\) com pontos centrais. Obtém-se outro modelo linear e, analogamente, define-se a direção de máximo crescimento da resposta via gradiente. Finalmente, na terceira região a ser explorada, como o teste de curvatura realizado via fatorial \(2^k\) com pontos centrais indicou curvatura significativa, completa-se o planejamento com mais pontos e novos experimentos, definindo um planejamento com região circular observada em azul, viabilizando a obtenção de um modelo quadrático passível de otimização.
7.3 Planejamento fatorial \(2^k\) com pontos centrais
Em diversas situações um modelo linear pode não se ajustar bem à região experimental. Nestes casos o fatorial \(2^k\) não oferecerá um modelo de regressão útil em toda região experimental, especialmente para a região central do planejamento. Há casos também que o experimentador deseja testar a presença de curvatura, isto é, testar se um modelo quadrático se ajustaria melhor aos dados, para propósito de experimentação sequencial e busca dos níveis ótimos operacionais dos fatores de controle avaliados.
A adição de pontos centrais no fatorial \(2^k\) permite testar a presença de curvatura na região experimental. Os pontos centrais são condições intermediárias entre os dois níveis fatoriais, sendo codificados em \(x_{j(0)}=0\). O planejamento fatorial com pontos centrais permite testar a hipótese \(H_0: \sum\beta_{jj}=0\), onde \(\beta_{jj}\), \(j = 1, ..., k\) são os coeficientes quadráticos, sendo portanto multiplicados por \(x_j^2\), \(j = 1, ..., k\), em um modelo de regressão de segunda ordem completo almejado. O fatorial \(2^k\) com pontos centrais não permite, entretanto, estimar um modelo quadrático, visto que não tem níveis suficientes para tal finalidade. Entretanto, ele é um passo preliminar para a obtenção de um modelo com termos de segunda ordem puros (quadráticos), possibilitando a posterior realização de experimentos em níveis adicionais para viabilizar a obtenção de um modelo quadrático. Tal estratégia sequencial para metodologia de superfície de resposta pode ser efetivada via planejamento composto central.
O fatorial \(2^k\) com pontos centrais também permite a economia experimental pela replicação apenas na condição intermediária, especialmente nos casos com elevado número de fatores \(k\). Deste modo, ao se obter um modelo completo via fatorial \(2^k\) com pontos centrais, os graus de liberdade para o erro são calculados com base nos pontos centrais, sendo o erro experimental estimado tomando a variância dos pontos centrais, conforme Equação 5.8, onde \(y_{c(i)}\) é o i-ésimo ponto central e \(n_c\) é o número de pontos centrais.
\[ \hat{\sigma}^2 = MS_E = \frac{\displaystyle \sum_{i=1}^{n_c}(y_{c(i)}-\bar{y}_c)^2}{n_c-1} \tag{7.3}\]
Exemplo 7.1 A influência da temperatura, da concentração de catalisador e da razão molar álcool/óleo no rendimento da produção de uma fração de baixo peso molecular foi estudada e otimizada por meio de um planejamento fatorial. A fração é composta de ésteres de caprilato, caprato, laurato e miristato butílico, os quais podem ser usados como valorosos produtos químicos (devido a suas inúmeras aplicações nas indústrias cosmética, farmacêutica e de alimentos). O planejamento fatorial \(2^3\) com adição de pontos centrais foi inicialmente utilizado para testar curvatura e avaliar a possibilidade futura de obtenção de um modelo quadrático. O planejamento é exposto na Tabela 7.1.
| ordem | T [ºC] | C [%] | MR | y [%] |
|---|---|---|---|---|
| 1 | 55 | 3 | 3 | 38 |
| 2 | 75 | 3 | 3 | 49 |
| 3 | 55 | 7 | 3 | 59 |
| 4 | 75 | 7 | 3 | 49 |
| 5 | 55 | 3 | 7 | 39 |
| 6 | 75 | 3 | 7 | 59 |
| 7 | 55 | 7 | 7 | 65 |
| 8 | 75 | 7 | 7 | 75 |
| 9 | 65 | 5 | 5 | 63 |
| 10 | 65 | 5 | 5 | 62 |
| 11 | 65 | 5 | 5 | 58 |
| 12 | 65 | 5 | 5 | 60 |
O efeito dos pontos centrais \(E_{0}\) é calculado como a diferença entre médias entre os pontos centrais e os pontos axiais, conforme Equação 7.4, onde \(\bar{y}_{fat}\) é a média dos pontos fatoriais, enquanto \(\bar{y}_{ctpt}\) é a média dos pontos centrais.
\[ E_{0} = \bar{y}_{fat}-\bar{y}_{ctpt} \tag{7.4}\]
Para gerar o planejamento do Exemplo 7.1 pode-se utilizar o código à seguir.
library(FrF2)
# Planejamento
planctpt <- FrF2(nruns = 8,
nfactors = 3,
factor.names = c("T", "C", "MR"),
ncenter = 4,
randomize = F)
# Adicionando a coluna com a resposta
planctpt$y <- c(38, 49, 59, 49, 39, 59, 65, 75, 63, 62, 58, 60)
summary(planctpt)Call:
FrF2(nruns = 8, nfactors = 3, factor.names = c("T", "C", "MR"),
ncenter = 4, randomize = F)
Experimental design of type full factorial.center
12 runs
Factor settings (scale ends):
T C MR
1 -1 -1 -1
2 1 1 1
The design itself:
T C MR y
1 -1 -1 -1 38
2 1 -1 -1 49
3 -1 1 -1 59
4 1 1 -1 49
5 -1 -1 1 39
6 1 -1 1 59
7 -1 1 1 65
8 1 1 1 75
9 0 0 0 63
10 0 0 0 62
11 0 0 0 58
12 0 0 0 60
class=design, type= full factorial.center Para testar a curvatura, deve-se considerar a soma dos quadrados para curvatura, conforme Equação 7.5.
\[ SS_0 = \frac{n_{fat}n_{ctpt}(\bar{y}_{fat}-\bar{y}_{center})^2}{n_{fat}+n_{ctpt}} \tag{7.5}\]
Para obter a ANOVA com teste de curvatura, deve-se proceder conforme segue. Optou-se por adicionar uma coluna center no planejamento para testar curvatura. Posteriormente, adicionou-se o termo center no modelo. Outra opção, caso o analista não queira criar esta coluna seria adicionando o termo !iscube(planctpt) no modelo. Em caso de significância na curvatura, o modelo de regressão é útil desde que ao realizar previsão nos pontos centrais, seja somado o efeito dos pontos centrais. Já ao realizar previsão nos pontos fatoriais o efeito da curvatura deve ser desconsiderado.
Para o Exemplo 7.1 o teste de curvatura apresentou significância estatística, \(p-valor = 0,01646 < 0,05 = \alpha\). Consequentemente, é viável a realização de experimentos adicionais para estimar um modelo quadrático completo. Entretanto, este exemplo será retomado posteriormente para entendimento da estratégia sequencial para metodologia de superfície de resposta.
# Adicionando coluna para teste de curvatura
planctpt$center <- c(rep(0, times =8), rep(1, times = 4))
# Regressão teste de curvatura
lm1 <- lm(formula = y ~ T*C*MR + center, data = planctpt)
summary(lm1)
Call:
lm.default(formula = y ~ T * C * MR + center, data = planctpt)
Residuals:
1 2 3 4 5 6 7
3,053e-16 1,031e-16 -1,048e-16 -8,049e-17 -1,489e-16 -1,462e-17 2,309e-16
8 9 10 11 12
1,087e-16 2,250e+00 1,250e+00 -2,750e+00 -7,500e-01
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 54,125 0,784 69,041 6,7e-06 ***
T 3,875 0,784 4,943 0,01588 *
C 7,875 0,784 10,045 0,00210 **
MR 5,375 0,784 6,856 0,00635 **
center 6,625 1,358 4,879 0,01646 *
T:C -3,875 0,784 -4,943 0,01588 *
T:MR 3,625 0,784 4,624 0,01904 *
C:MR 2,625 0,784 3,348 0,04411 *
T:C:MR 1,375 0,784 1,754 0,17772
---
Signif. codes: 0 '***' 0,001 '**' 0,01 '*' 0,05 '.' 0,1 ' ' 1
Residual standard error: 2,217 on 3 degrees of freedom
Multiple R-squared: 0,9884, Adjusted R-squared: 0,9576
F-statistic: 32,03 on 8 and 3 DF, p-value: 0,008# ANOVA
# anova1 <- aov(lm1)
# summary(anova1)A Figura 7.2 ilustra os gráficos de efeitos principais. Pode-se observar que a média da resposta nos pontos centrais confirma o indício de presença de curvatura na região experimental.
planctpt$fit <- lm1$fitted.values
meanc1 <- planctpt |>
group_by(T) |>
summarise(y=mean(fit))
meanc2 <- planctpt |>
group_by(C) |>
summarise(y=mean(fit))
meanc3 <- planctpt |>
group_by(MR) |>
summarise(y=mean(fit))
meanc1$ct <- ifelse(meanc1$T == 0, "0", "1")
meanc2$ct <- ifelse(meanc2$C == 0, "0", "1")
meanc3$ct <- ifelse(meanc3$MR == 0, "0", "1")
rangec <- c(min(meanc1$y,meanc2$y,meanc3$y),
max(meanc1$y,meanc2$y,meanc3$y))
pc1 <- ggplot(meanc1, aes(T,y,col = ct)) +
geom_line(lwd=1) +
geom_point(size=2) +
ylim(rangec) + theme(legend.position="none")
pc2 <- ggplot(meanc2, aes(C,y,col = ct)) +
geom_line(lwd=1) +
geom_point(size=2) +
ylim(rangec) + theme(legend.position="none")
pc3 <- ggplot(meanc3, aes(MR,y,col = ct)) +
geom_line(lwd=1) +
geom_point(size=2) +
ylim(rangec) + theme(legend.position="none")
library(ggpubr)
ggarrange(pc1,pc2,pc3, nrow=1)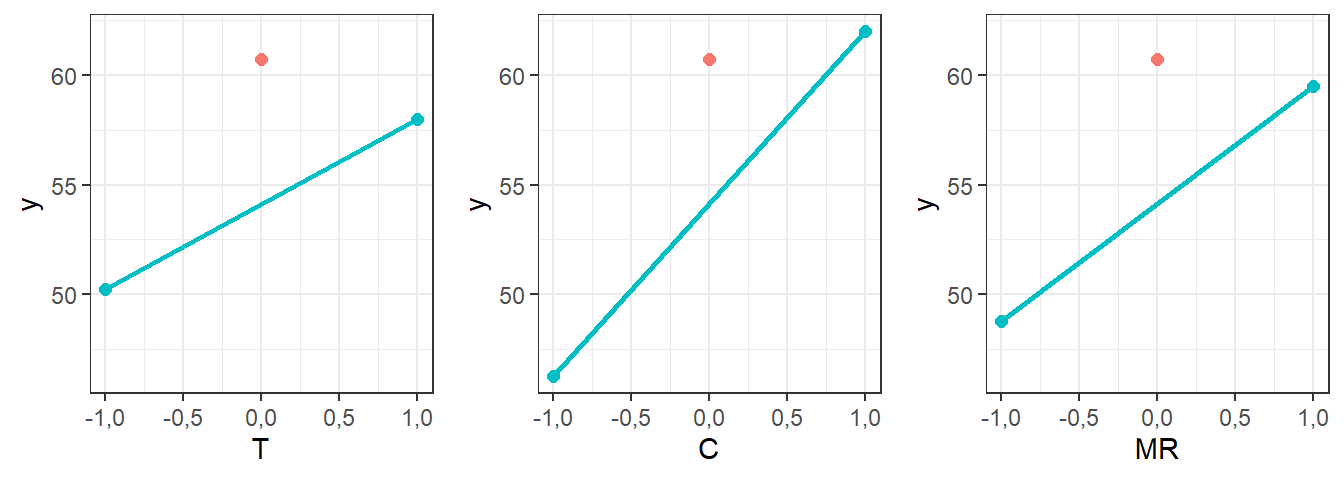
A Figura 7.3 ilustra os gráficos de interação de segunda ordem. Os pontos centrais são plotados à parte.
meanc12 <- planctpt |>
group_by(T,C) |>
summarise(y=mean(fit))
meanc13 <- planctpt |>
group_by(T,MR) |>
summarise(y=mean(fit))
meanc23 <- planctpt |>
group_by(C,MR) |>
summarise(y=mean(fit))
rangecc <- c(min(meanc12$y,meanc13$y,meanc23$y),
max(meanc12$y,meanc13$y,meanc23$y))
pc12 <- ggplot() +
geom_line(data = meanc12 |> filter(T != 0),
mapping = aes(x=T, y, col = as.factor(C),
shape = as.factor(C)), lwd=1) +
geom_point(data = meanc12 |> filter(T != 0),
mapping = aes(x=T, y, col = as.factor(C),
shape = as.factor(C)), size=2) +
geom_point(data = meanc12 |> filter(T == 0),
mapping = aes(x=T, y), shape=8, size=2) +
ylim(rangecc) +
labs(col = "C", shape = "C") +
theme(legend.position = "bottom")
pc13 <- ggplot() +
geom_line(data = meanc13 |> filter(T != 0),
mapping = aes(x=T, y, col = as.factor(MR),
shape = as.factor(MR)), lwd=1) +
geom_point(data = meanc13 |> filter(T != 0),
mapping = aes(x=T, y, col = as.factor(MR),
shape = as.factor(MR)), size=2) +
geom_point(data = meanc13 |> filter(T == 0),
mapping = aes(x=T, y), shape=8, size=2) +
ylim(rangecc) +
labs(col = "MR", shape = "MR") +
theme(legend.position = "bottom")
pc23 <- ggplot() +
geom_line(data = meanc23 |> filter(C != 0),
mapping = aes(x=C, y, col = as.factor(MR),
shape = as.factor(MR)), lwd=1) +
geom_point(data = meanc23 |> filter(C != 0),
mapping = aes(x=C, y, col = as.factor(MR),
shape = as.factor(MR)), size=2) +
geom_point(data = meanc23 |> filter(C == 0),
mapping = aes(x=C, y), shape=8, size=2) +
ylim(rangecc) +
labs(col = "MR", shape = "MR") +
theme(legend.position = "bottom")
library(ggpubr)
ggarrange(pc12,pc13,pc23, nrow=1)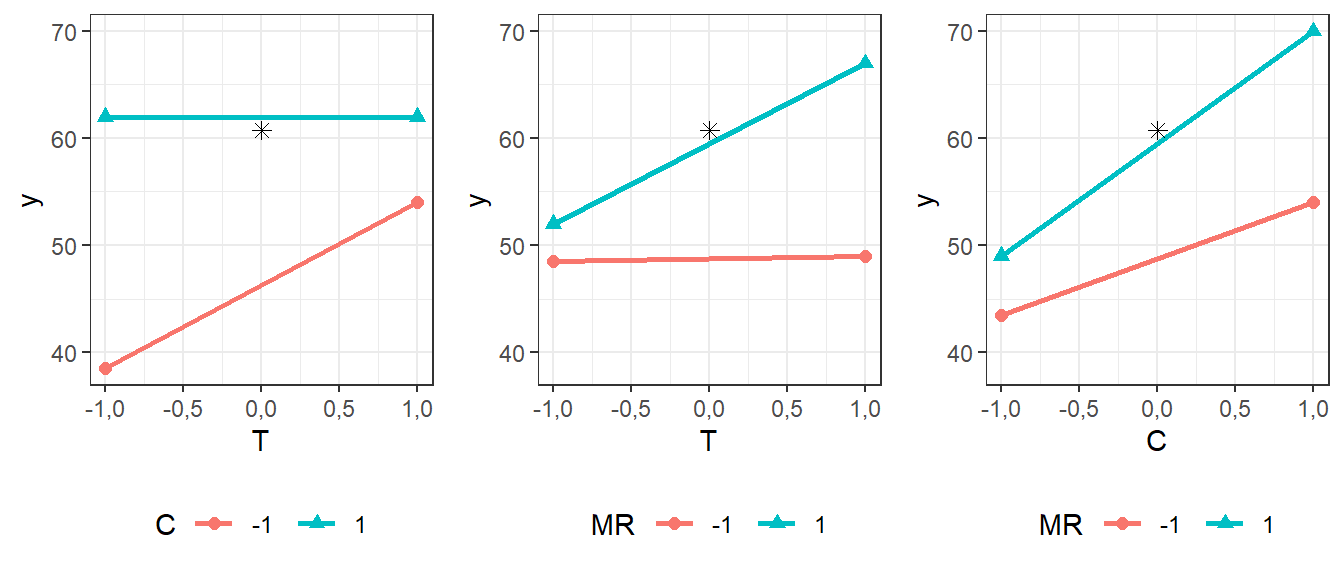
7.4 Planejamento composto central
O planejamento composto central (central composite design - CCD) apresenta boas propriedades de variância e tem sido extensivamente usado para obter modelos de superfície de resposta. O CCD possibilita a experimentação sequencial, garantindo economia na experimentação e busca de região de curvatura. Métodos como fatorial fracionado, blocagem do fatorial com pontos centrais e subida mais íngreme, conforme ilustrado na Figura 7.1 são comumente utilizados. Entretanto, em alguns problemas, devido a restrições de região experimental, realizar o CCD de forma direta é suficiente para obtenção de um modelo quadrático definitivo.
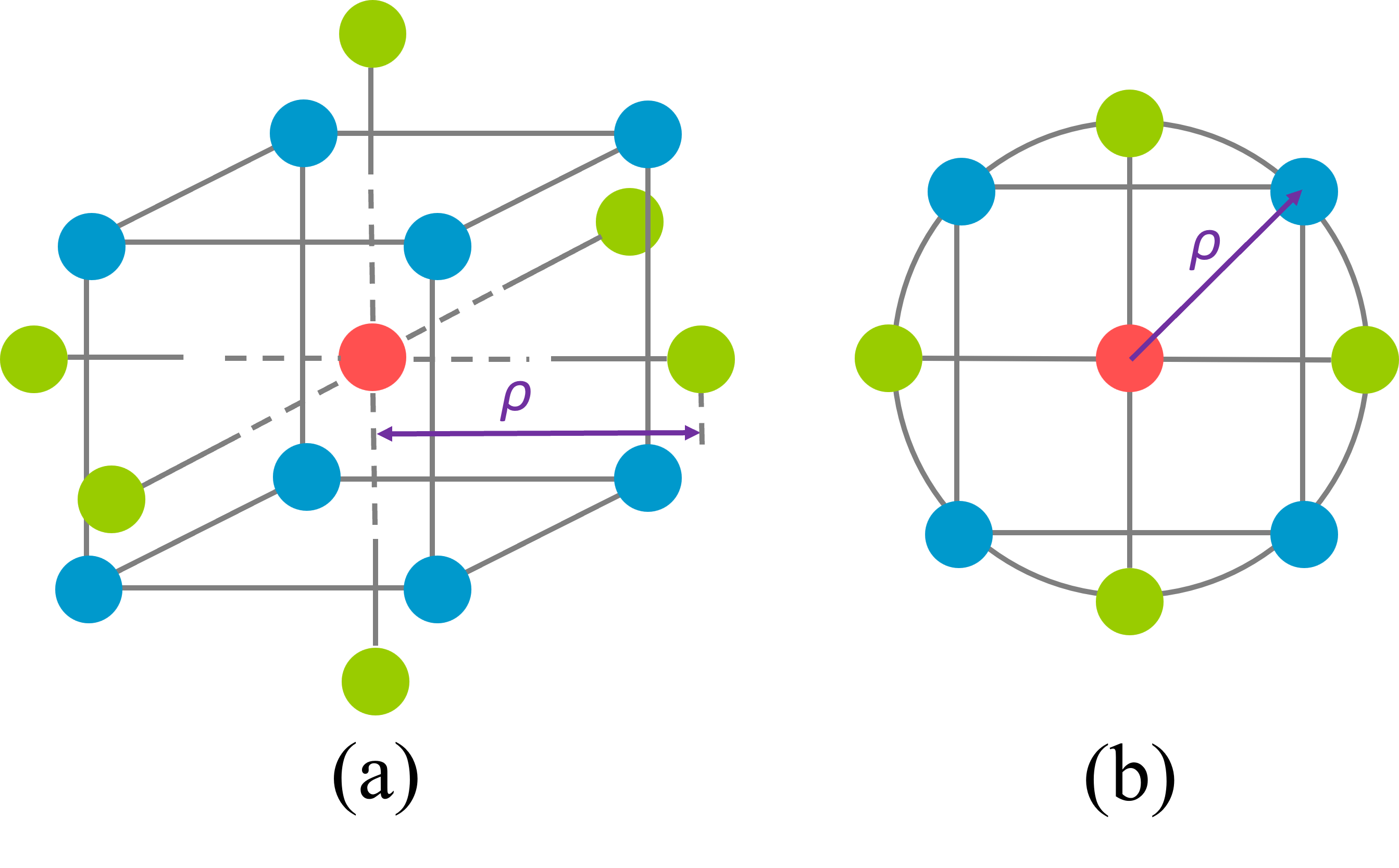
A Figura 7.4 ilustra o planejamento CCD para \(k = 2\) e \(k = 3\) variáveis de controle. Pode-se observar que o planejamento é composto de \(2^k\) pontos fatoriais (ou \(2^{k-p}\) pontos de um fatorial fracionado com resolução V ou maior de preferência), \(2k\) pontos axiais e \(nc\) pontos centrais. Este planejamento pode ser usado para obter um modelo na forma da Equação 7.2. A Tabela 7.2 apresenta um arranjo CCD genérico. A distância dos pontos axiais \(\rho\) e o número de pontos centrais é definida visando propriedades ótimas do planejamento e de previsão.
| ordem | x₁ | x₂ | ⋯ | xₖ |
|---|---|---|---|---|
| 1 | -1 | -1 | ⋯ | -1 |
| ⋮ | 1 | -1 | ⋯ | -1 |
| ⋮ | -1 | 1 | ⋯ | -1 |
| ⋮ | 1 | 1 | ⋯ | -1 |
| ⋮ | ⋮ | ⋮ | ⋯ | ⋮ |
| nf = 2k | 1 | 1 | ⋯ | 1 |
| 1 | -ρ | 0 | ⋯ | 0 |
| ⋮ | ρ | 0 | ⋯ | 0 |
| ⋮ | 0 | -ρ | ⋯ | 0 |
| ⋮ | 0 | ρ | ⋯ | 0 |
| ⋮ | ⋮ | ⋮ | ⋯ | ⋮ |
| ⋮ | 0 | 0 | ⋯ | -ρ |
| na = 2k | 0 | 0 | ⋯ | ρ |
| 1 | 0 | 0 | ⋯ | 0 |
| ⋮ | ⋮ | ⋮ | ⋯ | ⋮ |
| nc | 0 | 0 | ⋯ | 0 |
Pelas ilustrações da Figura 7.4, pode-se inferir que o CCD se limita a uma região experimental esférica. O valor do raio do planejamento, \(\rho\), pode ser considerado igual a \(\sqrt{k}\) para que esta região seja um círculo, esfera ou hiperesfera perfeita. No entanto, Box definiu que o ideal para obter um CCD dito rotacionável é que \(\rho = 2^{k/4}\). Um CCD rotacionável seria aquele no qual a variância do modelo se mantenha constante em pontos equidistanciados do centro do planejamento ou, de forma análoga, que a variância e covariância dos efeitos não seja alterada pela rotação do planejamento ou modelo. A rotação às vezes é importante, por exemplo ao diagonalizar o modelo para verificar as condições de otimalidade de primeira ordem, ou caracterizar a superfície de resposta. A título de exemplo a seguir expõe-se o código para obtenção de um CCD para \(k = 3\). Observa-se que \(\rho = 2^{k/4} = 1,6818\). É possível obter um CCD esférico fazendo alpha = "spherical". Nos casos quando o número de fatores \(k\) é par o CCD rotacionável é perfeitamente esférico. Em casos onde a região experimental é restrita e deseja-se que a distância dos pontos axiais não seja maior que a dos fatoriais, faz-se alpha = "faces", obtendo um CCD de face centrada (face-centered central composite design - FCD). O CCD permite a blocagem da sequência experimental, caso inicalmente seja realizado o fatorial compontos centrais, conforme observado na última coluna. Porém, é necessário que sejam alocados pontos centrais na parte fatorial com o argumento n0.
library(rsm)
ccd(3,
n0 = c(0,3),
alpha = "rotatable",
randomize = F
) run.order std.order x1.as.is x2.as.is x3.as.is Block
1 1 1 -1,000000 -1,000000 -1,000000 1
2 2 2 1,000000 -1,000000 -1,000000 1
3 3 3 -1,000000 1,000000 -1,000000 1
4 4 4 1,000000 1,000000 -1,000000 1
5 5 5 -1,000000 -1,000000 1,000000 1
6 6 6 1,000000 -1,000000 1,000000 1
7 7 7 -1,000000 1,000000 1,000000 1
8 8 8 1,000000 1,000000 1,000000 1
9 1 1 -1,681793 0,000000 0,000000 2
10 2 2 1,681793 0,000000 0,000000 2
11 3 3 0,000000 -1,681793 0,000000 2
12 4 4 0,000000 1,681793 0,000000 2
13 5 5 0,000000 0,000000 -1,681793 2
14 6 6 0,000000 0,000000 1,681793 2
15 7 7 0,000000 0,000000 0,000000 2
16 8 8 0,000000 0,000000 0,000000 2
17 9 9 0,000000 0,000000 0,000000 2
Data are stored in coded form using these coding formulas ...
x1 ~ x1.as.is
x2 ~ x2.as.is
x3 ~ x3.as.isNo CCD os pontos fatoriais ou fracionados são usados para estimar os efeitos lineares e interações de segunda ordem. Os pontos centrais ajudam a estimar o erro experimental e contribuem para estimar os termos quadráticos. Os pontos axiais tem grande contribuição na estimativa dos termos quadráticos, de forma que sem eles somente o somatório dos termos quadráticos, \(\sum \beta_{ii}\), seria obtido, o que é usado para testar curvatura.
Nos planejamentos fatoriais a ortogonalidade do planejamento é uma propriedade que garante independência das variáveis de controle, baixa variância dos coeficientes, independência dos coeficientes e boa capacidade de previsão do modelo de resposta. Entretanto, em planejamentos de segunda ordem a ortogonalidade não é uma propriedade presente de forma a garantir a total independência dos coeficientes de regressão.
Exemplo 7.2 Seja um experimento para determinar o conteúdo de cobre em diferentes amostras de água via espectrometria de emissão óptica. Os fatores de controle são x1: \(pH\) e x2: vazao - \(vz\) (\(mL/min\)). Os níveis fatoriais são 7 e 9 para pH e 7 e 9 \(mL/min\) para \(vz\). A resposta consiste no sinal analítico resultante das medições de altura de pico instrumental. Uma vez medidos tais valores para os experimentos realizados, o maior foi considerado como 100 e os demais como porcentagem deste máximo (sinal analítico relativo). Foi utilizado um CCD rotacionável e RSM para inferência, modelagem e otimização. https://doi.org/10.1016/j.jhazmat.2010.07.014
A Tabela 7.3 apresenta o planejamento considerado já com os resultados da resposta. O código apresentado em sequência pode ser usado para obtenção deste CCD e armazenamento da resposta. Pode-se observar que os fatores podem ser definidos de forma decodificada, ou seja, nas unidades originais. Por exemplo \(x_1\) consiste na vazão codificada, isto é, \(x_1 = (vz-8)/1\), onde 8 seria o nível central da vazão (a média dos fatoriais) e o denominador, neste caso unitário, consiste na distância entre os pontos fatoriais e o central.
# Planejamento CCD
ccd1 <- ccd(basis = ~x1+x2,
n0 = c(0,3),
alpha = "rotatable",
randomize = FALSE,
oneblock=TRUE,
coding = list(x1 ~ (vz - 8)/1, # mL/min
x2 ~ (pH - 8)/1)) # -
# resposta - sinal analitico relativo
y <- c(68.64, 69.82, 81.66, 85.80,
79.29, 87.57, 74.56, 94.08,
100, 99.41, 100)
# adicionando resposta ao planejamento
ccd1$y <- y| run.order | std.order | vz | pH | y |
|---|---|---|---|---|
| 1 | 1 | 7,000000 | 7,000000 | 68,64 |
| 2 | 2 | 9,000000 | 7,000000 | 69,82 |
| 3 | 3 | 7,000000 | 9,000000 | 81,66 |
| 4 | 4 | 9,000000 | 9,000000 | 85,80 |
| 1 | 1 | 6,585786 | 8,000000 | 79,29 |
| 2 | 2 | 9,414214 | 8,000000 | 87,57 |
| 3 | 3 | 8,000000 | 6,585786 | 74,56 |
| 4 | 4 | 8,000000 | 9,414214 | 94,08 |
| 5 | 5 | 8,000000 | 8,000000 | 100,00 |
| 6 | 6 | 8,000000 | 8,000000 | 99,41 |
| 7 | 7 | 8,000000 | 8,000000 | 100,00 |
7.5 Estimativa dos coeficientes de regressão
Seja o modelo da Equação 7.2 escrito de forma expandida conforme Equação 7.6.
\[ y=\beta_0+\beta_1 x_1+\ldots+\beta_k x_k+\beta_{11} x_1^2+\ldots+\beta_{k k} x_k^2+\beta_{12} x_1 x_2+\ldots+\beta_{(k-1)(k)} x_{(k-1)} x_{(k)}+\varepsilon \tag{7.6}\]
Em notação matricial, para facilitar a obtenção das estimativas de mínimos quadrados para os coeficientes, o modelo na forma da Equação 7.2 e da Equação 7.6, de forma análoga ao modelo obtido va fatorial \(2^k\), também pode ser representado como \(\mathbf{y}=X \boldsymbol{\beta}+\boldsymbol{\varepsilon}\), com os devidos ajustes nas matrizes e vetores:
\[ \begin{aligned} & \mathbf{y}=\left[\begin{array}{c} y_1 \\ y_2 \\ \vdots \\ y_N \end{array}\right] ; \quad \mathbf{X}=\left[\begin{array}{cccccccccc} 1 & x_{1(-)} & \cdots & x_{k(-)} & x_1^2 & \cdots & x_k^2 & x_{1(-)} x_{2(-)} & \cdots & x_{k-1(-)} x_{k(-)} \\ 1 & x_{1(+)} & \cdots & x_{k(-)} & x_1^2 & \cdots & x_k^2 & x_{1(+)} x_{2(-)} & \cdots & x_{k-1(-)} x_{k(-)} \\ \vdots & \vdots & \ddots & \vdots & \vdots & \ddots & \vdots & \vdots & \ddots & \vdots \\ 1 & x_{1(+)} & \cdots & x_{k(+)} & x_1^2 & \cdots & x_k^2 & x_{1(+)} x_{2(+)} & \cdots & x_{k-1(-)} x_{k(-)} \end{array}\right] ; \\ & \boldsymbol{\beta}=\left[\begin{array}{c} \beta_0 \\ \beta_1 \\ \vdots \\ \beta_k \\ \beta_{11} \\ \vdots \\ \beta_{k k} \\ \beta_{12} \\ \vdots \\ \beta_{(k-1)(k)} \end{array}\right]; \text{ } \boldsymbol{\varepsilon}=\left[\begin{array}{c} \varepsilon_1 \\ \varepsilon_2 \\ \vdots \\ \varepsilon_N \end{array}\right] \end{aligned}. \]
Onde o vetor de respostas \(\mathbf y\) é da ordem \(N \times 1\), a matriz do planejamento \(\mathbf{X}\) é da ordem \(N \times r\), o vetor de coeficientes \(\boldsymbol{\beta}\) é da ordem \(r \times 1\) e o vetor do erro aleatório é da ordem \(N \times 1\), sendo \(N = 2^k + 2k + n_c\) e \(r = 1 + 2^k + 2k + k(k − 1)/2\) para um modelo de resposta completo correspondente à Equação 7.6. Os coeficientes podem ser estimados pelo método dos mínimos quadrados, \(\hat{\boldsymbol{\beta}}=\left(\mathbf{X}^{\mathbf{T}} \mathbf{X}\right)^{-1} \mathbf{X}^{\mathbf{T}} \mathbf{y}\). A variância do modelo de superfície de resposta depende da matriz do planejamento \(\mathbf X\), com covariância \(\left(\mathbf{X}^{\mathbf{T}} \mathbf{X}\right)^{-1}\), do ponto avaliado, que em um modelo quadrático completo é da forma \(\mathbf x_0^T = [1, x_1, \dots,x_k, x_{11}, \dots,x_{kk}, x_1x_2, \dots, x_{k-1}x_k]^T\), e do erro experimental \(\hat\sigma^2 = \sqrt{MS_E}\), isto é, \(Var[\hat {\mathbf y}(\mathbf x)]=\mathbf x_0^T\left(\mathbf{X}^{\mathbf{T}} \mathbf{X}\right)^{-1}\mathbf x_0\).
Considerando o exemplo Exemplo 6.2 a seguir expõe-se a sintaxe para obtenção do modelo de regressão de superfície de resposta. Pode-se observar que o comando lm é utilizado, assim como no fatorial \(2^k\). Os termos quadráticos são adicionados usando a sintaxe I(xj^2). Para o estudo em questão observa-se que o termo linear do pH, o termo quadrático tanto da vazão quanto do pH foram significativos, além da constante.
lm1 <- lm(y ~ (x1+x2)^2 + I(x1^2) + I(x2^2), data = ccd1)
summary(lm1)
Call:
lm.default(formula = y ~ (x1 + x2)^2 + I(x1^2) + I(x2^2), data = ccd1)
Residuals:
1 2 3 4 5 6 7 8 9 10
-3,0731 -4,6705 -2,7245 -4,3219 2,5680 4,8270 3,9440 3,4510 0,1967 -0,3933
11
0,1967
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 99,803 2,768 36,052 3,09e-07 ***
x1 2,129 1,695 1,256 0,26470
x2 7,076 1,695 4,174 0,00871 **
I(x1^2) -10,035 2,018 -4,974 0,00420 **
I(x2^2) -9,590 2,018 -4,753 0,00509 **
x1:x2 0,740 2,397 0,309 0,77002
---
Signif. codes: 0 '***' 0,001 '**' 0,01 '*' 0,05 '.' 0,1 ' ' 1
Residual standard error: 4,795 on 5 degrees of freedom
Multiple R-squared: 0,9176, Adjusted R-squared: 0,8352
F-statistic: 11,14 on 5 and 5 DF, p-value: 0,009668# summary(aov(lm1))O modelo pode ser reduzido, usando o comando step, conforme segue. É importante notar que a estrutura hierárquica se mantém, de forma que a avaliação da eliminação de um termo linear só será realizada durante o algoritmo de eliminação caso o termo quadrático e os de interação que o involvem forem eliminados antes. Observa-se que o ajuste do modelo passou de 0,8352 para 0,8601 após a redução.
lm1_red <- step(lm1)Start: AIC=37,81
y ~ (x1 + x2)^2 + I(x1^2) + I(x2^2)
Df Sum of Sq RSS AIC
- x1:x2 1 2,19 117,14 36,020
<none> 114,95 37,813
- I(x2^2) 1 519,39 634,35 54,602
- I(x1^2) 1 568,71 683,66 55,425
Step: AIC=36,02
y ~ x1 + x2 + I(x1^2) + I(x2^2)
Df Sum of Sq RSS AIC
<none> 117,14 36,020
- x1 1 36,25 153,39 36,986
- x2 1 400,52 517,66 50,366
- I(x2^2) 1 519,39 636,54 52,640
- I(x1^2) 1 568,71 685,85 53,460summary(lm1_red)
Call:
lm.default(formula = y ~ x1 + x2 + I(x1^2) + I(x2^2), data = ccd1)
Residuals:
Min 1Q Median 3Q Max
-5,4105 -2,8988 0,1967 3,0095 4,8270
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 99,803 2,551 39,122 1,86e-08 ***
x1 2,129 1,562 1,363 0,22192
x2 7,076 1,562 4,529 0,00398 **
I(x1^2) -10,035 1,859 -5,397 0,00167 **
I(x2^2) -9,590 1,859 -5,158 0,00210 **
---
Signif. codes: 0 '***' 0,001 '**' 0,01 '*' 0,05 '.' 0,1 ' ' 1
Residual standard error: 4,419 on 6 degrees of freedom
Multiple R-squared: 0,916, Adjusted R-squared: 0,8601
F-statistic: 16,36 on 4 and 6 DF, p-value: 0,0022197.6 Condições de otimalidade de primeira ordem
Após apresentação do planejamento composto central e suas propriedades, além da obtenção do modelo de regressão, convém expor uma forma analítica para possibilitar a avaliação das condições de otimalidade de primeira ordem ou obtenção do ponto estacionário. O modelo exposto na Equação 7.6 também pode ser exposto em outra notação, sendo esta útil para otimização, conforme Equação 7.7:
\[ \hat y = \beta_0 + \mathbf{x}^T\mathbf b + \mathbf{x}^T\mathbf B \mathbf x\text{ ,} \tag{7.7}\]
onde \(\beta_0\) é a estimativa da constante, \(\mathbf{x}\) é o vetor das \(k\) variáveis de controle de ordem \(k \times 1\), \(\mathbf b\) é o vetor de coeficientes lineares de ordem \(k \times 1\) e \(\mathbf B\) é a matriz simétrica que contém os termos quadráticos e de interação de ordem \(k \times k\), conforme segue. Pode-se averiguar que os elementos da diagonal principal desta matriz são responsáveis pelos efeitos quadráticos, enquanto os outros elementos contribuem para a obtenção dos termos de interação.
\[ \mathbf b = \left[\begin{array}{c} \beta_1 \\ \beta_2 \\ \vdots \\ \beta_k \end{array}\right]\text{, } \mathbf x = \left[\begin{array}{c} x_1 \\ x_2 \\ \vdots \\ x_k \end{array}\right]\text{, } \mathbf{X} = \left[\begin{array}{cccc} \beta_{11} & \beta_{12}/2 & \cdots & \beta_{1k}/2 \\ & \beta_{22} & \cdots & \beta_{2k}/2 \\ & & \ddots & \vdots \\ \text{sym} & & & \beta_{kk} \end{array}\right] \\ \]
Para obter o ponto de inflexão ou estacionário, que são as condições de otimalidade de primeira ordem, iguala-se o gradiente da função a zero e resolve-se para \(\mathbf x\), conforme Equação 7.8.
\[ \begin{align} \nabla \hat y &= \frac {\partial \hat y}{\partial \mathbf x} = 0 \\ &= \mathbf b + 2 \mathbf B \mathbf x = 0 \\ \end{align} \]
\[ \mathbf x_s = -\frac{1}{2}\mathbf B^{-1}\mathbf b \tag{7.8}\]
O pacote rsm apresenta uma saída completa que, além do modelo de superfície de resposta, teste t e ANOVA reduzida, apresenta as condições de otimalidade de primeira ordem, ou ponto estacionário codificado e decodificado, além das condições de otimalidade de segunda ordem, às quais serão explicitadas em sequência. Pode-se usar a seguinte sintaxe, onde o modelo quadrático completo seria obtido via SO(x1,x2,...). O modelo reduzido deve ser escrito com termos de ordem distinta separados, com os termos de primeira ordem dentro de FO(x1,x2,...) e os termos quadráticos puros em PQ(x1,x2,...). Caso haja algum termo de interação significativo deveria vir com a sintaxe TWI(xi,xj). É importante esclarecer que para aplicar o comando step recomenda-se escrever o modelo da forma convencional e usar o comando lm, para depois definir o modelo reduzido análogo via rsm, obtendo uma análise completa.
# modelo completo via funcao rsm
# rsm1 <- rsm(y~SO(x1,x2), data = ccd1)
# summary(rsm1)
# modelo reduzido
rsm2 <- rsm(y~FO(x1,x2)+PQ(x1,x2), data = ccd1)
summary(rsm2)
Call:
rsm(formula = y ~ FO(x1, x2) + PQ(x1, x2), data = ccd1)
Estimate Std. Error t value Pr(>|t|)
(Intercept) 99,8033 2,5510 39,1225 1,863e-08 ***
x1 2,1287 1,5622 1,3626 0,221920
x2 7,0757 1,5622 4,5293 0,003978 **
x1^2 -10,0354 1,8594 -5,3972 0,001668 **
x2^2 -9,5904 1,8594 -5,1579 0,002099 **
---
Signif. codes: 0 '***' 0,001 '**' 0,01 '*' 0,05 '.' 0,1 ' ' 1
Multiple R-squared: 0,916, Adjusted R-squared: 0,8601
F-statistic: 16,36 on 4 and 6 DF, p-value: 0,002219
Analysis of Variance Table
Response: y
Df Sum Sq Mean Sq F value Pr(>F)
FO(x1, x2) 2 436,77 218,39 11,186 0,009458
PQ(x1, x2) 2 841,17 420,59 21,543 0,001826
Residuals 6 117,14 19,52
Lack of fit 4 116,91 29,23 251,887 0,003958
Pure error 2 0,23 0,12
Stationary point of response surface:
x1 x2
0,1060599 0,3688933
Stationary point in original units:
vz pH
8,106060 8,368893
Eigenanalysis:
eigen() decomposition
$values
[1] -9,590417 -10,035417
$vectors
[,1] [,2]
x1 0 -1
x2 -1 0O ponto estacionário nas unidades originais consiste em vz = 8.106 \(mL/min\) e pH = 8.369. O comando rsm também retorna como saídas as matrizes \(\mathbf b\) e \(\mathbf B\), viabilizando a obtenção do ponto estacionário como -0.5*solve(B)%*%b, ou usando o comando canonical e a saída xs.
# matrizes b e B
b <- rsm2$b
B <- rsm2$B
# ponto estacionario
xs <- canonical(rsm2)$xs
# ou
xs <- -0.5*solve(B)%*%b
xs [,1]
x1 0,1060599
x2 0,3688933Para saber o valor da resposta no ponto estacionário, isto é, \(\hat y(\mathbf x_s)\), pode-se usar o comando predict, conforme segue.
predict(rsm2, newdata = data.frame(x1 = xs[1],
x2 = xs[2])) 1
101,2213 O modelo de superfície de resposta pode ser visualizado usando gráficos de superfície e/ou contorno, conforme Figura 7.5 e Figura 7.6, respectivamente. Especialmente no caso do gráfico de contorno fica fácil confirmar os níveis do ponto estacionário.
contour(rsm2, ~x1 + x2, image = TRUE)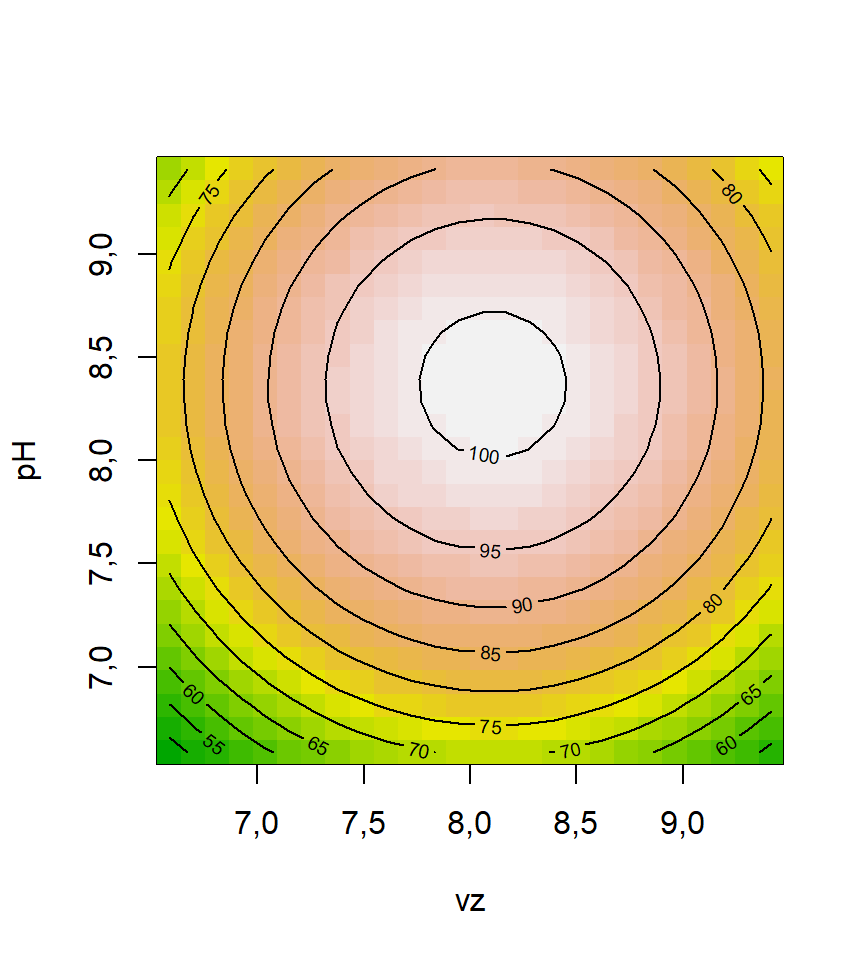
persp(rsm2, ~x1 + x2, zlab="y [%]",
col = rainbow(50), contours = ("colors"))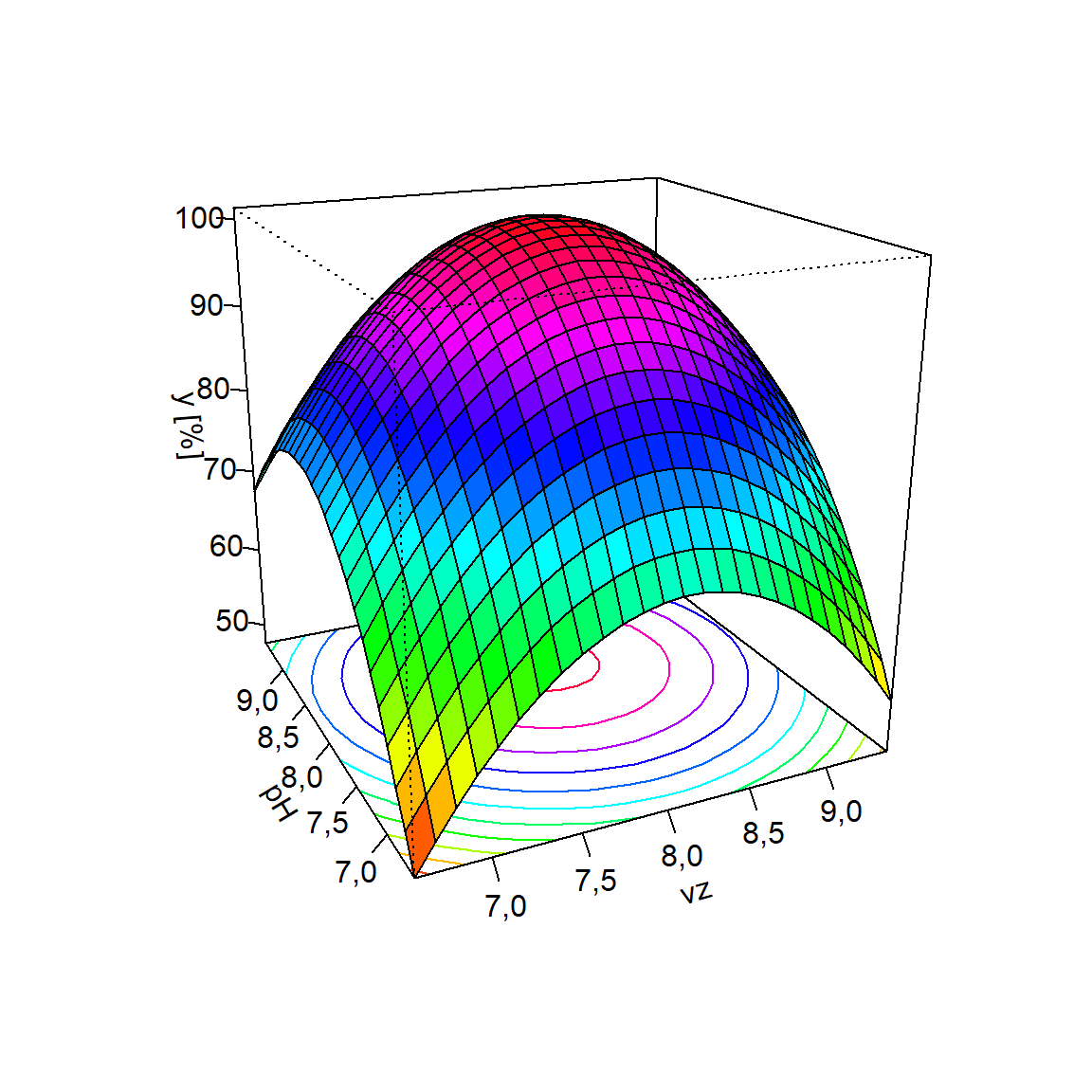
Outras visualizações podem ser concebidas para interpretar o efeito dos fatores na resposta de interesse, conforme Figura 7.7 e Figura 7.8 com códigos explicitados à seguir.
library(ggplot2)
# x1
x1_grid <- seq(min(ccd1$x1), max(ccd1$x1), 0.1)
center_grid <- rep(0,length(x1_grid))
x_range <- c(min(c(predict(rsm2,
newdata = data.frame(x1 = x1_grid,
x2 = center_grid)),
predict(rsm2,
newdata = data.frame(x2 = x1_grid,
x1 = center_grid)))),
max(c(predict(rsm2,
newdata = data.frame(x1 = x1_grid,
x2 = center_grid)),
predict(rsm2,
newdata = data.frame(x2 = x1_grid,
x1 = center_grid))))
)
p1 <- ggplot() +
geom_line(aes(x = x1_grid,
y = (predict(rsm2,
newdata = data.frame(x1 = x1_grid,
x2 = center_grid)))),
linewidth = 1,
colour = 'firebrick1') +
xlab("vz [mL/min]") +
ylab("sinal [%]") +
ylim(x_range) +
scale_x_continuous(breaks = c(-1, 0, 1), label = c(7,8,9)) +
theme_bw()
p2 <- ggplot() +
geom_line(aes(x = x1_grid,
y = (predict(rsm2,
newdata = data.frame(x2 = x1_grid,
x1 = center_grid)))),
linewidth = 1,
colour = 'dodgerblue3') +
xlab("pH") +
ylab("sinal [%]") +
ylim(x_range) +
scale_x_continuous(breaks = c(-1, 0, 1), label = c(7,8,9)) +
theme_bw()
library(ggpubr)
ggarrange(p1,p2, nrow=1)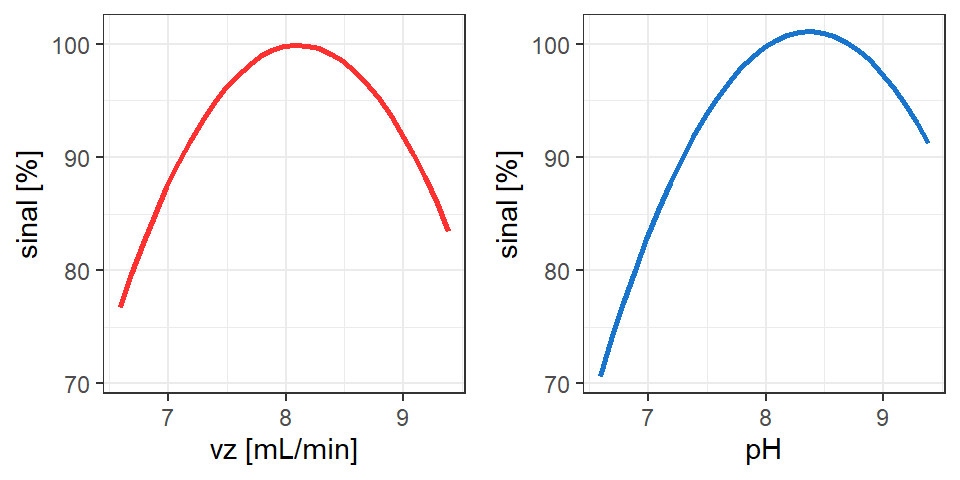
p12 <- ggplot() +
geom_line(aes(x = x1_grid,
y = predict(rsm2,
newdata = data.frame(x2 = x1_grid,
x1 = center_grid)),
color = "8", linetype = "8"), linewidth = 1) +
ggtitle('') +
xlab('pH') +
ylab('sinal [%]') +
ylim(58,103) +
scale_x_continuous(breaks = c(-1, 0, 1), label = c(7,8,9)) +
theme_bw()
x2_grid_1 = rep(-1,length(x1_grid))
x2_grid1 = rep(1,length(x1_grid))
p12 <- p12 +
geom_line(aes(x = x1_grid,
y = predict(rsm2,
newdata = data.frame(x2 = x1_grid,
x1 = x2_grid_1)),
color = "7", linetype = "7"), linewidth = 1) +
geom_line(aes(x = x1_grid,
y = predict(rsm2,
newdata = data.frame(x2 = x1_grid,
x1 = x2_grid1)),
color = "9", linetype = "9"), linewidth = 1) +
scale_color_manual(name = "vz",
values = c("7" = "orange1",
"8" = "green3",
"9" = "red1")) +
scale_linetype_manual(name = "vz",
values = c("7" = "dashed",
"8" = "longdash",
"9" = "solid"))
p12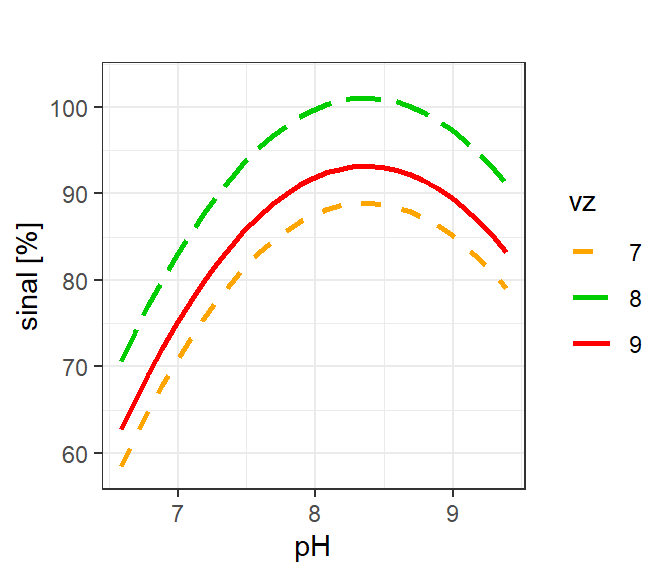
7.7 Condições de otimalidade de segunda ordem
Por ambas representações gráficas das Figura 7.7 e Figura 7.8 observa-se que o modelo obtido tem convexidade para baixo, apresentando ponto de máximo. Como no experimento do Exemplo 7.2 deseja-se maximizar a resposta, o ponto estacionário é suficiente para garantir o máximo rendimento no processo de estração de cobre. Existem casos, porém, que não é possível avaliar se o ponto estacionário é de interesse prático ou seja, sua natureza, de forma a saber se ele maximiza ou minimiza a função. Isso acontece porque quando \(k \ge 3\) a superfície de resposta não pode ser visualizada integralmente. Em tais casos é comum avaliar as condições de otimalidade de segunda ordem ou a natureza do ponto estacionário e a convexidade da superfície de resposta.
As condições de otimalidade de segunda ordem ou condições são obtidas a partir da matriz hessiana, ou seja, se por exemplo \(\mathbf H = \nabla^2 \hat y\) é positiva definida. A matriz \(\mathbf{H}\) é obtida conforme segue. Pode-se observar que ela consiste na matriz \(\mathbf{B}\) multiplicada por 2.
\[ \mathbf{H} = \nabla^2 \hat{y}(\mathbf{x}) = \left[ \begin{array}{cccc} \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_1^2} & \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_1 \partial x_2} & \cdots & \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_1 \partial x_k} \\ \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_2 \partial x_1} & \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_2^2} & \cdots & \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_2 \partial x_k} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_k \partial x_1} & \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_k \partial x_2} & \cdots & \frac{\partial^2 \hat{y}(\mathbf{x})}{\partial x_k^2} \end{array} \right] = \left[ \begin{array}{cccc} 2{\beta}_{11} & {\beta}_{12} & \cdots & {\beta}_{1k} \\ {\beta}_{12} & 2{\beta}_{22} & \cdots & {\beta}_{2k} \\ \vdots & \vdots & \ddots & \vdots \\ {\beta}_{1k} & {\beta}_{2k} & \cdots & 2{\beta}_{kk} \end{array} \right] = 2{\mathbf{B}} \]
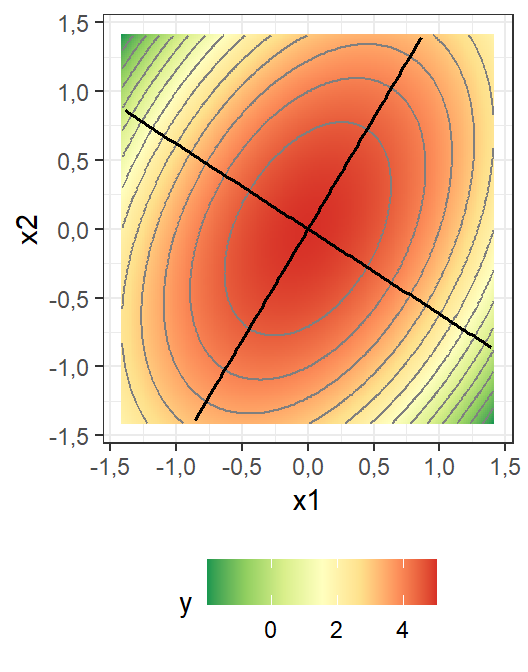
Sabendo que a matriz \(\mathbf{B}\) é simétrica de ordem \(k \times k\), pelo teorema da decomposição espectral, existe uma matriz ortogonal \(\mathbf{P}\), \(k \times k\), tal que \(\mathbf{P}^T\mathbf{B}\mathbf{P} = \mathbf \Lambda\), que contém em cada coluna os autovetores \(w = [w_1, w_2, \cdots, w_k]\) associados aos autovalores de \(\mathbf{B}\). A matriz \(\mathbf \Lambda\) é a matriz diagonal de autovalores \(\lambda_i\), \(i = 1, …, k\), de \(\mathbf{B}\). Os sinais dos autovalores, \(\lambda_i\), determinam a natureza do ponto estacionário e o tipo de superfície de resposta. A Figura 7.9 ilustra uma superfície de resposta com orientação inclinada em relação aos eixos das variáveis independentes. Tal inclinação aparecerá sempre que os termos de interação, o qual compõe os termos fora da diagonal da matriz \(\mathbf B\) forem não nulos. As linhas que definem os eixos do modelo são os autovalores deste. É importante rotacionar o modelo, ou diagonalizar \(\mathbf B\), de forma que a análise dos sinais de \(\lambda_i\) viabilizem a interpretação da convexidade do modelo.
A interpretação das condições de otimalidade de segunda ordem para superfície de resposta pode ser feita conforme segue:
Se \(\lambda_1, \cdots, \lambda_k\) são negativos, \(\mathbf{B}\) é negativa definida, \(\hat y\) tem convexidade para baixo e o ponto estacionário é de máximo;
Se \(\lambda_1, \cdots, \lambda_k\) são positivos, \(\mathbf{B}\) é positiva definida, \(\hat y\) tem convexidade para cima e o ponto estacionário é de mínimo;
Se \(\lambda_1, \cdots, \lambda_k\) são mistos, \(\mathbf{B}\) é indefinida e o ponto estacionário é de sela.
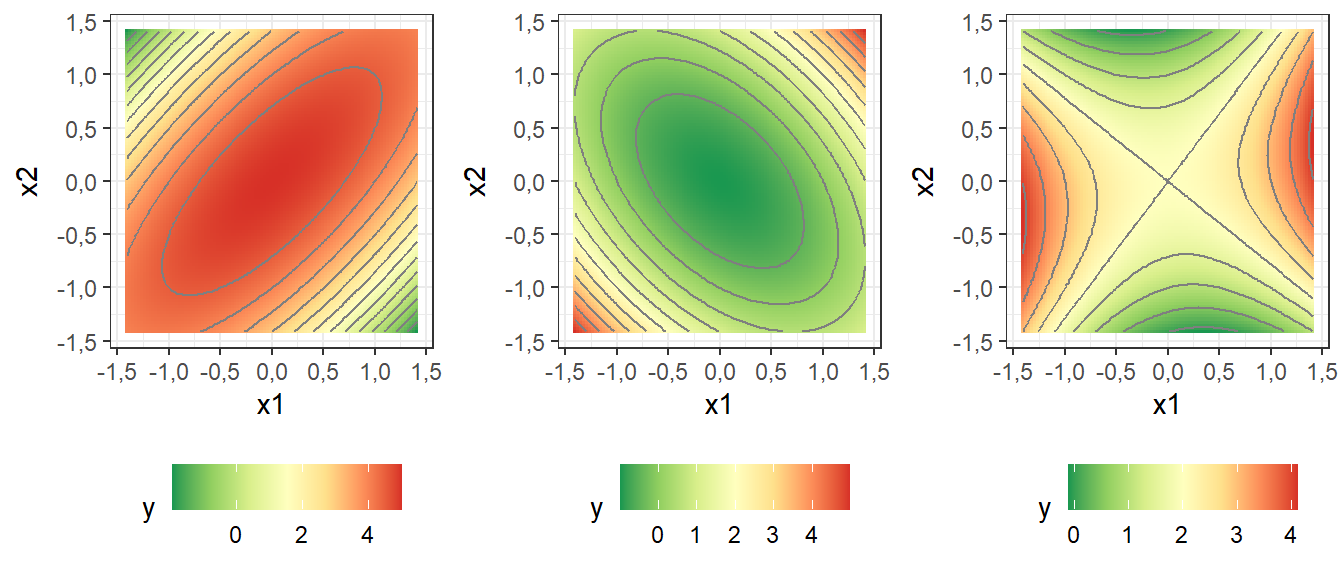
A Figura 7.10 ilustra três exemplos de modelos com distintas características de convexidade. À esquerda um modelo com autovalores negativos, no meio um com autovalores positivos e à direita um com autovalores mistos, apresentando respectivamente ponto estacionário de máximo, de mínimo e de sela. É importante perceber que este último não é de máximo tampouco de mínimo. Na prática caso o objetivo seja maximizar a resposta é interessante obter uma superfície de resposta com convexidade para baixo. Caso o objetivo seja minimizar a resposta é interessante obter uma superfície de resposta com convexidade para cima. A superfície no formato de sela nunca é interessante, uma vez que o ponto estacionário é apenas um ponto onde a derivada é nula, mas não otimiza a função, independente do objetivo do estudo.
Para obter os autovalores de \(\mathbf{B}\) deve-se resolver o autoproblema \(|\mathbf{B} - \mathbf \lambda \mathbf I| = 0\), resultando ema uma equação polinomial de ordem \(k\) cujas raizes são os autovalores de \(\mathbf{B}\).
Exemplo 7.3 Seja um estudo para otimizar a composição de catalisadores à base de Co, Ce e W suportados em carvão ativado, com foco na reforma de \(CO_2–CH_4\). Os fatores de controle são x1: massa de Co (g), x2: massa de W (g) e x3: massa de Ce (g). A resposta consiste no rendimento de CO. https://doi.org/10.1016/j.ijhydene.2020.01.226
O planejamento para o Exemplo 7.3 pode ser obtido com o código a seguir. Os valores da resposta também são fornecidos.
plan <- ccd(basis = ~x1+x2+x3,
n0 = c(0,3),
randomize = F,
alpha = "rotatable",
coding = list(x1 ~ (Co - 10)/2, # Co
x2 ~ (W - 1.5)/0.5, # W
x3 ~ (Ce - 4)/1)) # Ce
plan run.order std.order Co W Ce Block
1 1 1 8,000000 1,0000000 3,000000 1
2 2 2 12,000000 1,0000000 3,000000 1
3 3 3 8,000000 2,0000000 3,000000 1
4 4 4 12,000000 2,0000000 3,000000 1
5 5 5 8,000000 1,0000000 5,000000 1
6 6 6 12,000000 1,0000000 5,000000 1
7 7 7 8,000000 2,0000000 5,000000 1
8 8 8 12,000000 2,0000000 5,000000 1
9 1 1 6,636414 1,5000000 4,000000 2
10 2 2 13,363586 1,5000000 4,000000 2
11 3 3 10,000000 0,6591036 4,000000 2
12 4 4 10,000000 2,3408964 4,000000 2
13 5 5 10,000000 1,5000000 2,318207 2
14 6 6 10,000000 1,5000000 5,681793 2
15 7 7 10,000000 1,5000000 4,000000 2
16 8 8 10,000000 1,5000000 4,000000 2
17 9 9 10,000000 1,5000000 4,000000 2
Data are stored in coded form using these coding formulas ...
x1 ~ (Co - 10)/2
x2 ~ (W - 1.5)/0.5
x3 ~ (Ce - 4)/1y <- c(88.36, 93.40, 89.22, 92.02, 91.28, 92.02, 89.62, 88.92,
85.98, 89.72, 91.43, 88.53, 95.66, 94.63,
94.38, 94.53, 94.08)
plan$y <- yA seguir realiza-se a análise completa via rsm. Observa-se que todos os termos do modelo foram significativos e o modelo apresentou excelente ajuste, com \(R^2_{aj} = 0,9894\). Apesar dos autovalores serem obtidos, neste caso eles não são úteis, dado que os autovalores são mistos, de forma que o modelo tem formato de sela.
res.rsm <- rsm(y ~ SO(x1,x2,x3), data = plan)
summary(res.rsm)
Call:
rsm(formula = y ~ SO(x1, x2, x3), data = plan)
Estimate Std. Error t value Pr(>|t|)
(Intercept) 94,341870 0,164148 574,7379 < 2,2e-16 ***
x1 1,037567 0,077085 13,4600 2,932e-06 ***
x2 -0,743744 0,077085 -9,6483 2,708e-05 ***
x3 -0,211780 0,077085 -2,7474 0,028613 *
x1:x2 -0,460000 0,100717 -4,5673 0,002582 **
x1:x3 -0,975000 0,100717 -9,6806 2,649e-05 ***
x2:x3 -0,530000 0,100717 -5,2623 0,001170 **
x1^2 -2,331911 0,084843 -27,4849 2,166e-08 ***
x2^2 -1,578842 0,084843 -18,6089 3,211e-07 ***
x3^2 0,247261 0,084843 2,9143 0,022521 *
---
Signif. codes: 0 '***' 0,001 '**' 0,01 '*' 0,05 '.' 0,1 ' ' 1
Multiple R-squared: 0,9954, Adjusted R-squared: 0,9894
F-statistic: 167,6 on 9 and 7 DF, p-value: 2,464e-07
Analysis of Variance Table
Response: y
Df Sum Sq Mean Sq F value Pr(>F)
FO(x1, x2, x3) 3 22,869 7,6230 93,937 5,112e-06
TWI(x1, x2, x3) 3 11,545 3,8483 47,422 5,104e-05
PQ(x1, x2, x3) 3 87,991 29,3302 361,429 4,909e-08
Residuals 7 0,568 0,0812
Lack of fit 5 0,463 0,0926 1,764 0,4001
Pure error 2 0,105 0,0525
Stationary point of response surface:
x1 x2 x3
0,1693026 -0,3289331 0,4095174
Stationary point in original units:
Co W Ce
10,338605 1,335533 4,409517
Eigenanalysis:
eigen() decomposition
$values
[1] 0,3614754 -1,5213599 -2,5036078
$vectors
[,1] [,2] [,3]
x1 0,1675212 0,30486530 0,9375467
x2 0,1138866 -0,95060326 0,2887616
x3 -0,9792683 -0,05840032 0,1939663A Figura 7.11 ilustra gráficos de contorno obtidos com código abaixo. É importante entender que cada visualização consiste em um corte do modelo que não pode ser visualizado de forma integral, uma vez que está no \(\mathcal R ^4\). Logo, para cada par de variáveis plotadas, a remanescente é fixada, neste caso no nível central.
par(mfrow = c(1,3))
contour(res.rsm, ~x1 + x2 + x3, image = TRUE)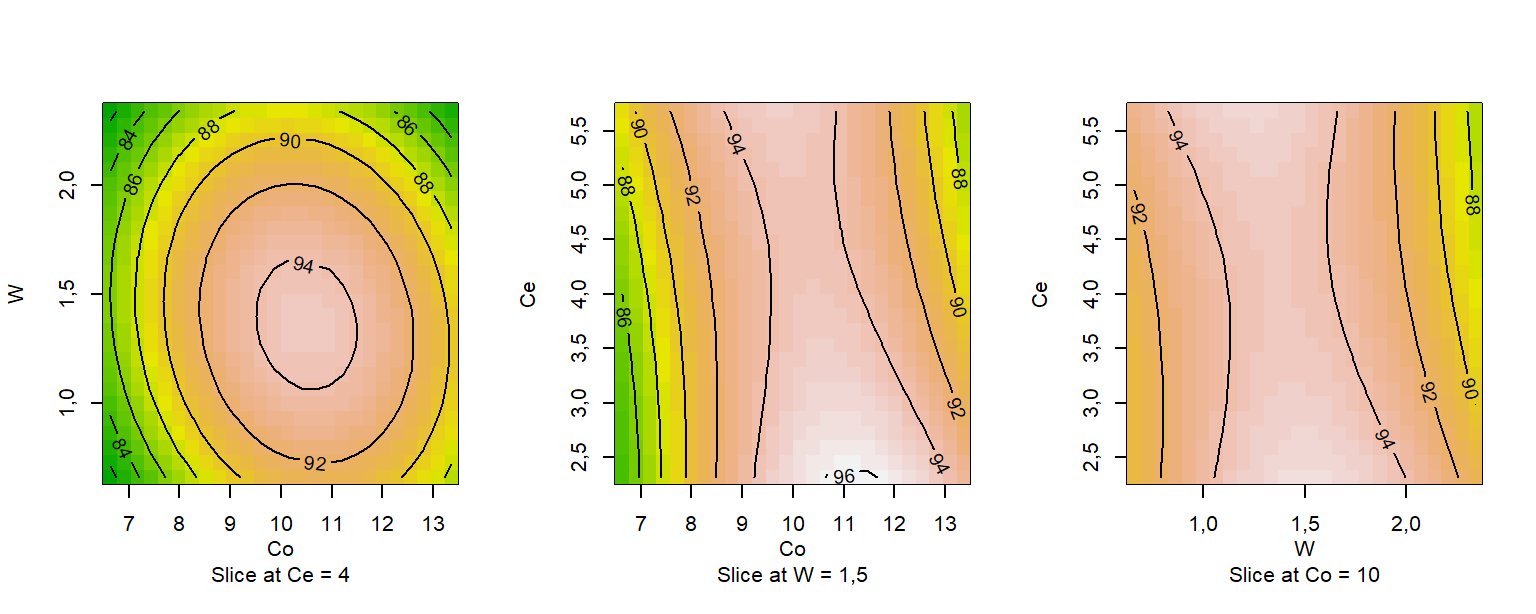
7.8 Otimização não linear restrita
Para os casos onde o modelo apresenta formato de sela ou então apresenta convexidade ao contrário do sentido desejado para otimização, sugere-se realizar a otimização não linear restrita que, no contexto da RSM, é chamada de análise rígida. Por exemplo, seja o caso onde deseja-se minimizar a resposta, a Equação 7.9 define a formulação da otimização restrita, onde a restrição \(\mathbf x^T\mathbf x \leq \rho^2\) define a região experimental, podendo ser escrita como \(x_1^2 + x_2^2 + \cdots + x_k^2 \leq \rho^2\).
\[ \begin{align} \min_{\mathbf x} & \{\hat y = \beta_0 + \mathbf{x}^T\mathbf b + \mathbf{x}^T\mathbf B \mathbf x\} \\ \textrm{s.t.: } & \mathbf x^T\mathbf x \leq \rho^2\\ \end{align} \tag{7.9}\]
O código à seguir pode ser utilizado para maximizar o rendimento de CO considerando o modelo de superfície de resposta estimado restrito à região experimental. A restrição de desigualdade g_x foi definida. O comando solnl do pacote NlcOptim permite a minimização de funções usando o algoritmo de programação sequencial quadrática, o qual admite restrições. Tal comando foi implementado para minimização. Como deseja-se maximizar o rendimento, usa-se o artifício de minimizar o negativo da função.
y_hat <- function(x){
y_hat <- predict(res.rsm, newdata = data.frame(x1 = x[1],
x2 = x[2],
x3 = x[3]))
return(-y_hat)
}
ro <<- (2^3)^0.25 # raio do planejamento
# restrição esférica
g_x <- function(x){
g1 <- x[1]^2 + x[2]^2 + x[3]^2 - ro^2
return(list(ceq=NULL,c=g1))
}
x0 <- rep(0,3)
# Otimização
library(NlcOptim)
res.otim <- solnl(X = x0, objfun = y_hat, confun = g_x)A seguir obtém-se os níveis ótimos codificados dos parâmetros.
res.otim$par [,1]
[1,] 0,47133056
[2,] -0,02587354
[3,] -1,61418871Finalmente obtém-se o rendimento ótimo.
1
96,04244 Felizmente o pacote rsm também apresenta a função steepest que viabiliza a obtenção do ótimo restrito à região esférica. A pequena diferença no resultado é devido ao passo utilizado de 0,01, neste caso.
# Analise rigida
otim <- steepest(res.rsm, dist=seq(0, ro, by=.01), descent = F)Path of steepest ascent from ridge analysis:# otim
otim[nrow(otim),] dist x1 x2 x3 | Co W Ce | yhat
169 1,68 0,471 -0,026 -1,612 | 10,942 1,487 2,388 | 96,0397.9 Planejamento Box-Behnken
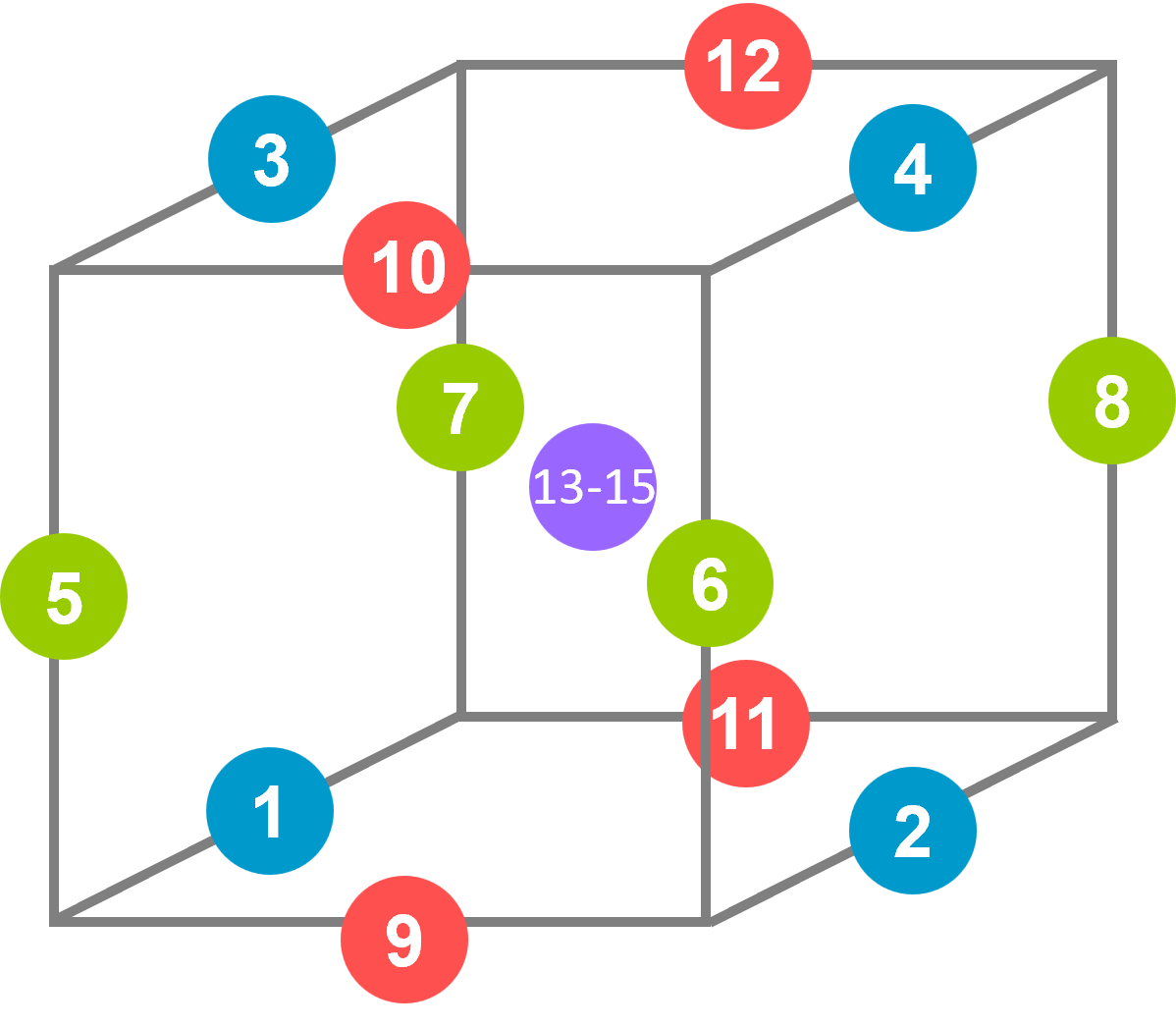
O planejamento Box-Behnken (Box-Behnken Design - BBD) foi proposto pelos pesquisadores George Box e Bonald Behnken nos anos 60, como proposta alternativa para obtenção de modelos de superfície de resposta, garantindo boas propriedades estatísticas e baixo custo na experimentação. Para \(k\leq6\) fatores o planejamento consiste em blocos de combinações de fatoriais \(2^2\) com os fatores remanescentes fixos no ponto central. A Figura 7.12 ilustra o planejamento para \(k=3\) com três pontos centrais, com correspondência com a Tabela 7.4. Pode-se observar em azul os 4 primeiros pontos consistindo em um fatorial \(2^2\) para \(x_1\) e \(x_2\) com \(x_3\) no ponto central, os pontos 5 a 8 com um fatorial \(2^2\) para \(x_1\) e \(x_3\) e \(x_2\) no ponto central e os pontos 9 a 12 com um fatorial \(2^2\) para \(x_2\) e \(x_3\) e \(x_1\) no ponto central, além de três pontos centrais nos experimentos 13 a 15. O número de pontos centrais pode ser customizado. Para \(k=6\) ou mais fatores ao invés de combinações de fatoriais \(2^2\) são considerados fatoriais \(2^3\).
| Ordem | x₁ | x₂ | x₃ |
|---|---|---|---|
| 1 | -1 | -1 | 0 |
| 2 | 1 | -1 | 0 |
| 3 | -1 | 1 | 0 |
| 4 | 1 | 1 | 0 |
| 5 | -1 | 0 | -1 |
| 6 | 1 | 0 | -1 |
| 7 | -1 | 0 | 1 |
| 8 | 1 | 0 | 1 |
| 9 | 0 | -1 | -1 |
| 10 | 0 | 1 | -1 |
| 11 | 0 | -1 | 1 |
| 12 | 0 | 1 | 1 |
| 13 | 0 | 0 | 0 |
| 14 | 0 | 0 | 0 |
| 15 | 0 | 0 | 0 |
Um planejamento BBD para \(k\leq5\) apresenta \(N=2k(k-1)+n_c\) experimentos no total. Para os pontos nas arestas do cubo a distância até os pontos centrais é exatamente igual a \(\sqrt{2}\). Ou seja, o BBD é um planejamento esférico com raio igual \(\sqrt{2}\) para \(k\leq5\) e \(\sqrt{3}\) para \(k\geq6\). Recomenda-se entretanto realizar RSM para número baixo de fatores. É importante observar que o BBD só é possível para \(k\geq3\) fatores.
A Tabela 7.5 compara o número de ensaios para o BBD e o CCD segundo o número de fatores. Observa-se que para \(3\leq k\leq4\) o BBD é uma opção interessante, sendo mais econômico que o CCD. Já para \(k \geq5\) o CCD resulta em número menor de ensaios. É importante enfatizar que a escolha não deve-se basear somente no número de experimentos, mas também na estratéga experimental almejada. Por exemplo, o CCD permite a experimentação sequencial. Outra questão é que enquanto no CCD o raio do planejamento cresce com \(k\), no BBD ele é fixo, de forma que, ao se realizar procedimentos de otimização restrita para casos onde as condições de otimalidade de segunda ordem não são de interesse, a região experimental codificada é limitada comparativamente ao CCD. Obviamente tudo depende da relativa escolha dos níveis decodificados dos fatores em estudo.
| k | CCD | BBD |
|---|---|---|
| 2 | 8 + \(n_c\) | - |
| 3 | 14 + \(n_c\) | 12 + \(n_c\) |
| 4 | 24 + \(n_c\) | 24 + \(n_c\) |
| 5 | 26* + \(n_c\) | 40 + \(n_c\) |
| 6 | 44 + \(n_c\) | 48 + \(n_c\) |
| 7 | 78 + \(n_c\) | 56 + \(n_c\) |
| *fatorial fracionado \(2^{5-1}\) |
Exemplo 7.4 Seja um experimento de sinterização de inibição seletiva de peças de polietileno de alta densidade com os seguintes fatores de controle: x1: altura da camada (mm), x2: Energia do aquecedor (\(J/mm^2\)), x3: Velocidade de avanço do aquecedor (mm/s) e x4: Velocidade de avanço da impressora (mm/min). A resposta y consiste no encolhimento das peças no sentido da largura. # https://link.springer.com/article/10.1007%2Fs40799-018-0286-6
A Tabela Tabela 7.6 apresenta o planejamento com a resposta, o qual pode ser obtido com o código abaixo.
# Planejamento
design <- bbd(k = ~x1+x2+x3+x4,
block = F,
n0 = 5,
randomize = F,
coding = list(x1 ~ (Ac - 0.2)/0.1,
x2 ~ (Ea - 25.32)/3.16,
x3 ~ (vf_a - 3.5)/0.5,
x4 ~ (vf_p - 100)/20))
# desvio na largura
width <- c(5.3533, 5.2615, 5.0008, 4.2712, 4.5840, 2.7470, 3.8086, 3.9839,
4.3630, 3.5519, 4.0534, 4.0031, 5.1495, 4.5581, 4.1959, 3.5946,
5.1642, 4.0103, 3.6354, 4.2529, 3.5171, 4.4485, 5.3879, 3.4132,
3.8905, 4.3263, 4.2203, 3.9451, 3.9024)
design$y <- width| run.order | std.order | x1 | x2 | x3 | x4 | y |
|---|---|---|---|---|---|---|
| 1 | 1 | -1 | -1 | 0 | 0 | 5,3533 |
| 2 | 2 | 1 | -1 | 0 | 0 | 5,2615 |
| 3 | 3 | -1 | 1 | 0 | 0 | 5,0008 |
| 4 | 4 | 1 | 1 | 0 | 0 | 4,2712 |
| 5 | 5 | 0 | 0 | -1 | -1 | 4,5840 |
| 6 | 6 | 0 | 0 | 1 | -1 | 2,7470 |
| 7 | 7 | 0 | 0 | -1 | 1 | 3,8086 |
| 8 | 8 | 0 | 0 | 1 | 1 | 3,9839 |
| 9 | 9 | -1 | 0 | 0 | -1 | 4,3630 |
| 10 | 10 | 1 | 0 | 0 | -1 | 3,5519 |
| 11 | 11 | -1 | 0 | 0 | 1 | 4,0534 |
| 12 | 12 | 1 | 0 | 0 | 1 | 4,0031 |
| 13 | 13 | 0 | -1 | -1 | 0 | 5,1495 |
| 14 | 14 | 0 | 1 | -1 | 0 | 4,5581 |
| 15 | 15 | 0 | -1 | 1 | 0 | 4,1959 |
| 16 | 16 | 0 | 1 | 1 | 0 | 3,5946 |
| 17 | 17 | -1 | 0 | -1 | 0 | 5,1642 |
| 18 | 18 | 1 | 0 | -1 | 0 | 4,0103 |
| 19 | 19 | -1 | 0 | 1 | 0 | 3,6354 |
| 20 | 20 | 1 | 0 | 1 | 0 | 4,2529 |
| 21 | 21 | 0 | -1 | 0 | -1 | 3,5171 |
| 22 | 22 | 0 | 1 | 0 | -1 | 4,4485 |
| 23 | 23 | 0 | -1 | 0 | 1 | 5,3879 |
| 24 | 24 | 0 | 1 | 0 | 1 | 3,4132 |
| 25 | 25 | 0 | 0 | 0 | 0 | 3,8905 |
| 26 | 26 | 0 | 0 | 0 | 0 | 4,3263 |
| 27 | 27 | 0 | 0 | 0 | 0 | 4,2203 |
| 28 | 28 | 0 | 0 | 0 | 0 | 3,9451 |
| 29 | 29 | 0 | 0 | 0 | 0 | 3,9024 |
A análise pode ser realizada com o comando rsm, conforme segue. Pelos resultados observa-se que apenas as interações \(x_1x_2\), \(x_1x_4\) e \(x_2x_3\) não foram significativas, além do termo quadrático \(x_3^2\). O modelo apresenta um bom ajuste, com \(R_{aj}^2 = 0,9198\), porém sugere-se ao leitor tentar reduzir o modelo via lm e step para avaliar se é possível melhorar um pouco mais, aproximando \(R_{aj}^2\) de \(R^2\). Já é possível constatar pela análise dos sinais dos autovalores que o ponto estacionário não é últil para minimizar o desvio dimensional no sentido da largura.
# Analise
rsm.bbd <- rsm(y ~ SO(x1,x2,x3,x4), data = design)
summary(rsm.bbd)
Call:
rsm(formula = y ~ SO(x1, x2, x3, x4), data = design)
Estimate Std. Error t value Pr(>|t|)
(Intercept) 4,056920 0,081357 49,8655 < 2,2e-16 ***
x1 -0,184933 0,052516 -3,5215 0,0033875 **
x2 -0,298233 0,052516 -5,6789 5,693e-05 ***
x3 -0,405417 0,052516 -7,7199 2,068e-06 ***
x4 0,119883 0,052516 2,2828 0,0385872 *
x1:x2 -0,159450 0,090960 -1,7530 0,1014672
x1:x3 0,442850 0,090960 4,8686 0,0002485 ***
x1:x4 0,190200 0,090960 2,0910 0,0552423 .
x2:x3 -0,002475 0,090960 -0,0272 0,9786765
x2:x4 -0,726525 0,090960 -7,9873 1,395e-06 ***
x3:x4 0,503075 0,090960 5,5307 7,405e-05 ***
x1^2 0,323777 0,071429 4,5328 0,0004688 ***
x2^2 0,477602 0,071429 6,6864 1,033e-05 ***
x3^2 -0,080797 0,071429 -1,1312 0,2769959
x4^2 -0,308648 0,071429 -4,3210 0,0007043 ***
---
Signif. codes: 0 '***' 0,001 '**' 0,01 '*' 0,05 '.' 0,1 ' ' 1
Multiple R-squared: 0,9599, Adjusted R-squared: 0,9198
F-statistic: 23,94 on 14 and 14 DF, p-value: 2,31e-07
Analysis of Variance Table
Response: y
Df Sum Sq Mean Sq F value Pr(>F)
FO(x1, x2, x3, x4) 4 3,6225 0,90563 27,3647 1,738e-06
TWI(x1, x2, x3, x4) 6 4,1546 0,69243 20,9225 3,067e-06
PQ(x1, x2, x3, x4) 4 3,3140 0,82850 25,0338 2,984e-06
Residuals 14 0,4633 0,03310
Lack of fit 10 0,3000 0,03000 0,7347 0,6856
Pure error 4 0,1633 0,04083
Stationary point of response surface:
x1 x2 x3 x4
1,0579092 0,1742857 -0,8902676 -0,4104952
Stationary point in original units:
Ac Ea vf_a vf_p
0,3057909 25,8707427 3,0548662 91,7900965
Eigenanalysis:
eigen() decomposition
$values
[1] 0,6966486 0,3725336 -0,0899158 -0,5673314
$vectors
[,1] [,2] [,3] [,4]
x1 0,4113305 0,78063120 0,4678823 0,05008278
x2 -0,7896263 0,50636028 -0,1821966 0,29477793
x3 0,2429853 0,36542084 -0,7745350 -0,45554504
x4 0,3850399 -0,02611146 -0,3846896 0,83849651Não há indícios para rejeição da hipótese de normalidade dos resíduos, dado resultado do teste de Shapiro-Wilk exposto abaixo.
# Normalidade
shapiro.test(rsm.bbd$residuals)
Shapiro-Wilk normality test
data: rsm.bbd$residuals
W = 0,93612, p-value = 0,07937A Figura 7.13 ilustra gráficos de contorno para desvio dimensional de peças obtidas via sinterização de inibição seletiva.
# Graficos
par(mfrow = c(2,3))
contour(rsm.bbd, ~x1 + x2 + x3 + x4, image = TRUE)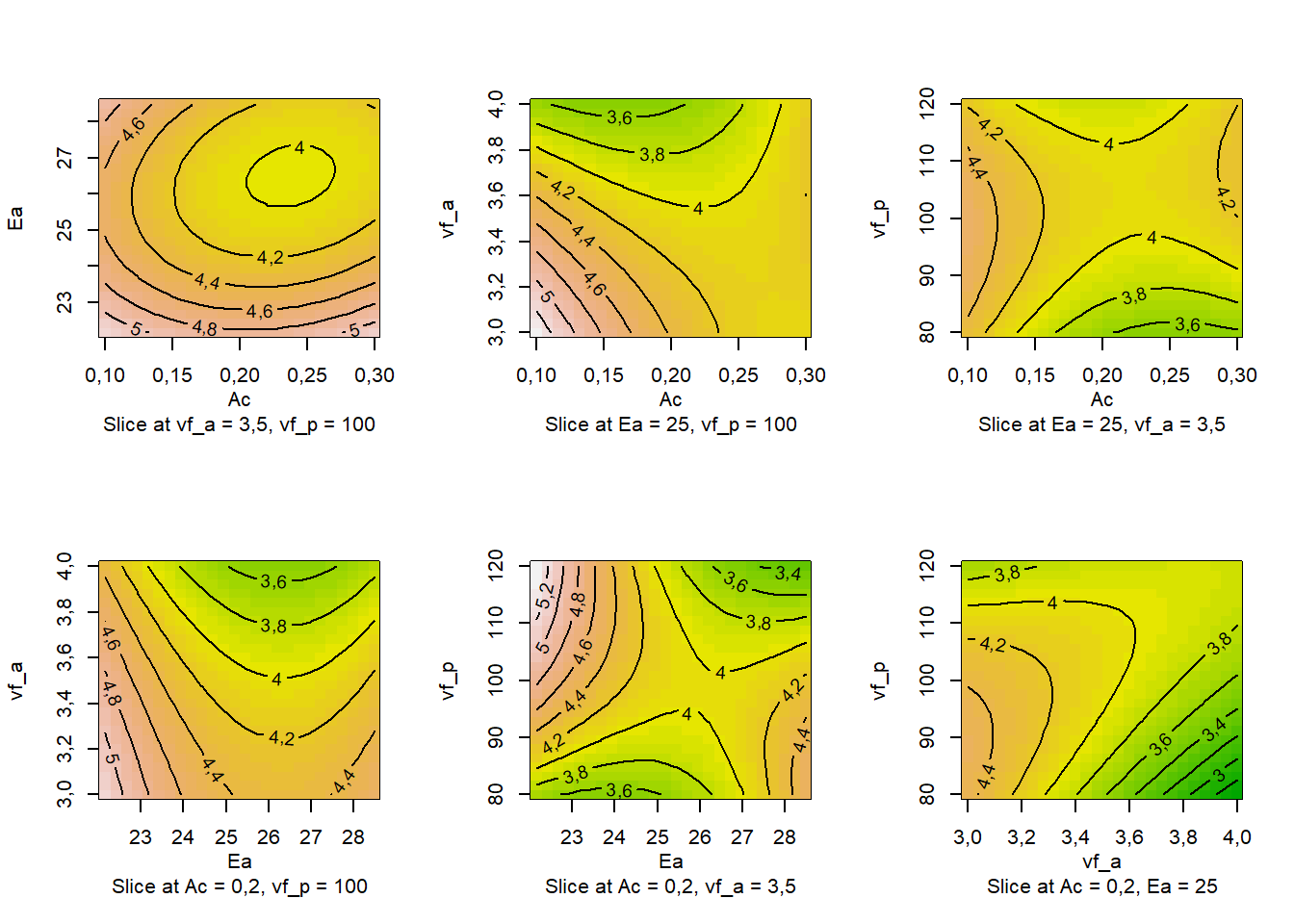
Por fim, apresenta-se o código e resultado da otimização restrita, sendo expostos níveis dos fatores que minimizam o desvio dimensional. Recomenda-se \(Ac\) = 0,1987 \(mm\), \(Ea\) = 24,628 \(J/mm^2\), \(Vf_a\) = 3,93 \(mm/s\) e \(Vf_p\) = 78,36 \(mm/min\). O desvio mínimo predito foi \(\hat y\) = 2,6 \(mm\).
# Otimizacao restrita
otimo <- steepest(rsm.bbd, dist=seq(0, sqrt(2), by=.1), descent=TRUE)Path of steepest descent from ridge analysis:otimo[nrow(otimo),] dist x1 x2 x3 x4 | Ac Ea vf_a vf_p | yhat
15 1,4 -0,013 -0,219 0,86 -1,082 | 0,1987 24,62796 3,93 78,36 | 2,606Bibliografia
ANDERSON-COOK, C. M.; BORROR, C. M.; MONTGOMERY, D. C. Response surface design evaluation and comparison. Journal of Statistical Planning and Inference, v. 139, n. 2, p. 629-641, 2009.
BOX, G. E. P.; DRAPER, N. R. A basis for the selection of a response surface design. Journal of the American Statistical Association, v. 54, n. 287, p. 622-654, 1959.
BOX, G. E. P.; DRAPER, N. R. Response surfaces, mixtures, and ridge analyses. New Jersey: John Wiley & Sons, 2007.
BOX, G. E. P.; HUNTER, J. S. Multi-factor experimental designs for exploring response surfaces. The Annals of Mathematical Statistics, p. 195-241, 1957.
BOX, G. E. P.; HUNTER, J. S. The 2k-p fractional factorial designs. Technometrics, v. 3, n. 3, p. 311-351, 1961.
BOX, G. E. P.; HUNTER, J. S.; HUNTER, William Gordon. Statistics for experimenters: design, innovation, and discovery. New York: Wiley-Interscience, 2005.
BOX, G. E. P.; WILSON, K. B. On the Experimental Attainment of Optimum Conditions. Journal of the Royal Statistical Society. Series B (Methodological), v. 13, n. 1, p. 1-45, 1951.
DEL CASTILLO, E. Process optimization: a statistical approach. New York: Springer, 2007.
DRAPER, N. R.; GUTTMAN, I. An index of rotatability. Technometrics, v. 30, n. 1, p. 105-111, 1988.
DRAPER, N. R.; LIN, D. K. J. Small response-surface designs. Technometrics, v. 32, n. 2, p. 187-194, 1990.
DUNN, K. Process Improvement Using Data. Disponível em: http://learnche.org/pid, 2010. Acesso em: 05/2025.
GIOVANNITTI-JENSEN, A.; MYERS, R. H. Graphical assessment of the prediction capability of response surface designs. Technometrics, v. 31, n. 2, p. 159-171, 1989.
KHURI, A. I. A measure of rotatability for response-surface designs. Technometrics, v. 30, n. 1, p. 95-104, 1988.
LUCAS, J. M. Which response surface design is best: a performance comparison of several types of quadratic response surface designs in symmetric regions. Technometrics, v. 18, n. 4, p. 411-417, 1976.
MONTGOMERY, D. C. Design and analysis of experiments. John Wiley & Sons, 2013.
MORRIS, M. D. A class of three-level experimental designs for response surface modeling. Technometrics, v. 42, n. 2, p. 111-121, 2000.
MYERS, R. H.; MONTGOMERY, D. C.; ANDERSON-COOK, C. M. Response surface methodology: process and product optimization using designed experiments. John Wiley & Sons, 2016.
NOCEDAL, J.; WRIGHT, S. J. Numerical optimization. Springer Science, v. 35, n. 67-68, p. 7, 2006.
OYEJOLA, B. A.; NWANYA, J. C. Selecting the right Central Composite Design. International Journal of Statistics and Applications, v. 5, n. 1, p. 21-30, 2015.
RAO, S. S. Engineering optimization: theory and practice. John Wiley & Sons, 2009.
SEBER, G. A. F.; LEE, A. J. Linear regression analysis. John Wiley & Sons, 2003.
UKAEGBU, E. C.; CHIGBU, P. E. Graphical evaluation of the prediction capabilities of partially replicated orthogonal central composite designs. Quality and Reliability Engineering International, v. 31, n. 4, p. 707-717, 2015.
WEISBERG, S. Applied linear regression. John Wiley & Sons, 2005.
7.10 Exercícios
- O estudo de Amarachinta et al. (2021) buscou otimizar o tamanho das vesículas (Y) de ethosomas carregados com carvedilol utilizando um Delineamento Composto Central (CCD) dentro da metodologia de superfície de resposta (RSM). Foram considerados três fatores, cada um em cinco níveis: concentração de fosfolipídeo (x1), concentração de etanol (x2) e temperatura de preparação (x3). O objetivo do experimento foi avaliar como esses fatores influenciam o tamanho médio das vesículas (nm), resposta crítica para a estabilidade e eficiência do sistema de entrega transdérmica. O planejamento experimental completo, com pontos axiais e pontos centrais, é apresentado na Tabela 7.7.
| x1 | x2 | x3 | y |
|---|---|---|---|
| 2,0000000 | 20,00000 | 5,000000 | 130 |
| 5,0000000 | 20,00000 | 5,000000 | 550 |
| 2,0000000 | 40,00000 | 5,000000 | 1050 |
| 5,0000000 | 40,00000 | 5,000000 | 868 |
| 2,0000000 | 20,00000 | 10,000000 | 130 |
| 5,0000000 | 20,00000 | 10,000000 | 200 |
| 2,0000000 | 40,00000 | 10,000000 | 1086 |
| 5,0000000 | 40,00000 | 10,000000 | 600 |
| 0,9773108 | 30,00000 | 7,500000 | 800 |
| 6,0226892 | 30,00000 | 7,500000 | 632 |
| 3,5000000 | 13,18207 | 7,500000 | 280 |
| 3,5000000 | 46,81793 | 7,500000 | 1200 |
| 3,5000000 | 30,00000 | 3,295518 | 550 |
| 3,5000000 | 30,00000 | 11,704482 | 190 |
| 3,5000000 | 30,00000 | 7,500000 | 321 |
| 3,5000000 | 30,00000 | 7,500000 | 345 |
| 3,5000000 | 30,00000 | 7,500000 | 315 |
| 3,5000000 | 30,00000 | 7,500000 | 318 |
| 3,5000000 | 30,00000 | 7,500000 | 311 |
| 3,5000000 | 30,00000 | 7,500000 | 350 |
Obtenha o planejamento no R.
Obtenha o modelo de regressão via
lme faça o teste t para os coeficientes do modelo completo. Avalie a significância de cada termo considerado.Avalie a possibilidade de reduzir o modelo completo usando eliminação para trás via
step.Obtenho o melhor modelo usando o comando
rsme avalie a as condições de otimalidade de primeira e segunda ordem.Avalie a normalidade dos resíduos do modelo final.
Faça os gráficos de contorno e de superfície do modelo final.
Quais são as condições que minimizam o tamanho das vesículas? Justifique como foi realizada a otimização (ponto estacionário ou otimização não linear restrita).
Amarachinta, P. R., Sharma, G., Samed, N., Chettupalli, A. K., Alle, M., & Kim, J. C. (2021). Central composite design for the development of carvedilol-loaded transdermal ethosomal hydrogel for extended and enhanced anti-hypertensive effect. Journal of nanobiotechnology, 19(1), 100.
- Em um estudo recente, Mahfud e Ansori (2022) investigaram uma rota alternativa para a produção de biodiesel baseada na interesterificação de óleo vegetal utilizando acetato de metila como doador de grupos alquila e metóxido de potássio como catalisador. Diferentemente da rota alcoólica tradicional, essa abordagem gera triacetina como subproduto, o qual possui valor comercial e é miscível ao biodiesel, eliminando a necessidade de etapa adicional de separação. Com o objetivo de maximizar o rendimento de biodiesel, o processo foi conduzido com auxílio de ultrassom, técnica empregada para acelerar a taxa de reação. Para avaliar os efeitos das variáveis de processo e buscar condições ótimas, foi utilizado um Planejamento Box–Behnken (BBD) considerando quatro fatores: razão molar entre acetato de metila e óleo (x1), concentração de catalisador (x2), temperatura da reação (x3) e tempo de interesterificação (x4). A resposta (y) analisada foi o rendimento na produção de biodiesel (%). O planejamento experimental completo é apresentado na Tabela 7.8.
| x1 | x2 | x3 | x4 | y |
|---|---|---|---|---|
| 1,50 | 0,050 | 0,525 | 20 | 8,210 |
| 5,00 | 0,050 | 0,525 | 20 | 73,760 |
| 1,50 | 0,500 | 0,525 | 20 | 29,310 |
| 5,00 | 0,500 | 0,525 | 20 | 87,230 |
| 3,25 | 0,275 | 0,050 | 10 | 65,320 |
| 3,25 | 0,275 | 1,000 | 10 | 48,990 |
| 3,25 | 0,275 | 0,050 | 30 | 66,220 |
| 3,25 | 0,275 | 1,000 | 30 | 49,980 |
| 1,50 | 0,275 | 0,525 | 10 | 17,745 |
| 5,00 | 0,275 | 0,525 | 10 | 74,870 |
| 1,50 | 0,275 | 0,525 | 30 | 18,176 |
| 5,00 | 0,275 | 0,525 | 30 | 75,230 |
| 3,25 | 0,050 | 0,050 | 20 | 59,870 |
| 3,25 | 0,500 | 0,050 | 20 | 83,980 |
| 3,25 | 0,050 | 1,000 | 20 | 44,120 |
| 3,25 | 0,500 | 1,000 | 20 | 63,760 |
| 1,50 | 0,275 | 0,050 | 20 | 24,340 |
| 5,00 | 0,275 | 0,050 | 20 | 81,820 |
| 1,50 | 0,275 | 1,000 | 20 | 17,210 |
| 5,00 | 0,275 | 1,000 | 20 | 69,670 |
| 3,25 | 0,050 | 0,525 | 10 | 52,140 |
| 3,25 | 0,500 | 0,525 | 10 | 73,790 |
| 3,25 | 0,050 | 0,525 | 30 | 51,760 |
| 3,25 | 0,500 | 0,525 | 30 | 74,540 |
| 3,25 | 0,275 | 0,525 | 20 | 59,230 |
| 3,25 | 0,275 | 0,525 | 20 | 60,170 |
| 3,25 | 0,275 | 0,525 | 20 | 58,980 |
Obtenha o planejamento no R.
Obtenha o modelo de regressão via
lme faça o teste t para os coeficientes do modelo completo. Avalie a significância de cada termo considerado.Avalie a possibilidade de reduzir o modelo completo usando eliminação para trás via
step.Obtenho o melhor modelo usando o comando
rsme avalie a as condições de otimalidade de primeira e segunda ordem.Avalie a normalidade dos resíduos do modelo final.
Faça os gráficos de de contorno e superfície do modelo final e interprete os efeitos.
Quais são as condições que maximizam o rendimento na produção de biodiesel? Justifique como foi realizada a otimização (ponto estacionário ou otimização não linear restrita).
Mahfud, M., & Ansori, A. (2022). Box-Behnken design for optimization on biodiesel production from palm oil and methyl acetate using ultrasound assisted interesterification method. Periodica Polytechnica Chemical Engineering, 66(1), 30-42.
- No estudo de Rajamurugan (2012) et al., investigou-se o processo de furação de compósitos de poliéster reforçado com fibra de vidro (GFRP), amplamente utilizados em estruturas primárias de aeronaves devido à elevada resistência mecânica e ao baixo coeficiente de expansão térmica. A qualidade dos furos obtidos depende fortemente das condições de corte e dos parâmetros da ferramenta, sendo a força de avanço (thrust force) uma resposta crítica para evitar delaminação e danos estruturais. Para analisar a influência dos fatores de processo sobre a força de avanço e obter um modelo preditivo, Foi usada a metodologia de superfície de resposta. Foram considerados quatro fatores: velocidade de rotação da ferramenta (x1) em rev/min, velocidade de avanço (x2) em mm/min, diâmetro da broca (x3) em mm e ângulo de orientação das fibras (x4) em graus. A resposta avaliada foi a força de avanço (N) gerada durante a furação. O planejamento experimental correspondente é apresentado na Tabela 7.9.
| x1 | x2 | x3 | x4 | y |
|---|---|---|---|---|
| 875 | 112,5 | 6 | 22,5 | 37 |
| 1625 | 112,5 | 6 | 22,5 | 72 |
| 875 | 237,5 | 6 | 22,5 | 99 |
| 1625 | 237,5 | 6 | 22,5 | 108 |
| 875 | 112,5 | 10 | 22,5 | 72 |
| 1625 | 112,5 | 10 | 22,5 | 93 |
| 875 | 237,5 | 10 | 22,5 | 108 |
| 1625 | 237,5 | 10 | 22,5 | 110 |
| 875 | 112,5 | 6 | 67,5 | 27 |
| 1625 | 112,5 | 6 | 67,5 | 108 |
| 875 | 237,5 | 6 | 67,5 | 124 |
| 1625 | 237,5 | 6 | 67,5 | 189 |
| 875 | 112,5 | 10 | 67,5 | 96 |
| 1625 | 112,5 | 10 | 67,5 | 176 |
| 875 | 237,5 | 10 | 67,5 | 175 |
| 1625 | 237,5 | 10 | 67,5 | 225 |
| 500 | 175,0 | 8 | 45,0 | 86 |
| 2000 | 175,0 | 8 | 45,0 | 178 |
| 1250 | 50,0 | 8 | 45,0 | 45 |
| 1250 | 300,0 | 8 | 45,0 | 171 |
| 1250 | 175,0 | 4 | 45,0 | 51 |
| 1250 | 175,0 | 12 | 45,0 | 120 |
| 1250 | 175,0 | 8 | 0,0 | 95 |
| 1250 | 175,0 | 8 | 90,0 | 190 |
| 1250 | 175,0 | 8 | 45,0 | 220 |
| 1250 | 175,0 | 8 | 45,0 | 215 |
| 1250 | 175,0 | 8 | 45,0 | 216 |
| 1250 | 175,0 | 8 | 45,0 | 221 |
| 1250 | 175,0 | 8 | 45,0 | 222 |
| 1250 | 175,0 | 8 | 45,0 | 223 |
Identifique o tipo de planejamento usado e reproduza-o no R.
Obtenha o modelo de regressão via
lme faça o teste t para os coeficientes do modelo completo. Avalie a significância de cada termo considerado.Avalie a possibilidade de reduzir o modelo completo usando eliminação para trás via
step.Obtenho o melhor modelo usando o comando
rsme avalie a as condições de otimalidade de primeira e segunda ordem.Avalie a normalidade dos resíduos do modelo final.
Faça os gráficos de de contorno e superfície do modelo final e interprete os efeitos.
Quais são as condições que minimizam a força de avanço? Justifique como foi realizada a otimização (ponto estacionário ou otimização não linear restrita).
Rajamurugan, T. V., Shanmugam, K., Rajakumar, S., & Palanikumar, K. (2012). Modelling and analysis of thrust force in drilling of GFRP composites using response surface methodology (RSM). Procedia Engineering, 38, 3757-3768.